Braquistócrona
2011-04-19
El problema de la braquistócrona es el de encontrar el camino más rápido entre dos puntos que puede seguir un cuerpo forzado a seguir dicho camino en presencia de un campo gravitatorio uniforme y constante y en ausencia de fricción. Este problema, propuesto por Johann Bernoulli a finales del siglo XVII, supuso un excelente estímulo para el desarrollo de las técnicas del cálculo infinitesimal y el cálculo de variaciones.
A muchos estudiantes se les habla del problema de la braquistócrona y se les revela cuál es la solución sin entrar en detalles sobre cómo llegar a ella. Este artículo está dedicado a esas mentes curiosas que tienen las herramientas adecuadas en sus manos para resolver el problema, pero carecen todavía de la soltura adecuada para hacer un buen uso de ellas y necesitan un empujoncito. El rigor a veces brillará un poco por su ausencia y la notación será objeto de abuso, pero espero que los incautos lectores más exigentes en el terreno matemático sean misericordes.
Planteamiento del problema
La física de este problema es clásica y no relativista: son de aplicación las leyes del movimiento de Newton y el principio de relatividad de Galileo, el espacio es tridimensional y euclídeo y el tiempo sirve de etiqueta independiente.
Tenemos un cuerpo puntual y con masa, sometido a la atracción de un campo gravitatorio uniforme e invariable en el tiempo. Sostenemos el cuerpo en el borde de una rampa que conecta con un punto de destino que se encuentra más abajo. En un momento dado, soltamos el cuerpo y dejamos que se deslize sin rozamiento por la rampa bajo la acción de su propio peso. La pregunta es: ¿qué forma ha de tener la rampa para que el tiempo sea mínimo? La forma de esta rampa (la forma de la trayectoria) es la braquistócrona: la curva de descenso más rápido. Esta curva no es, en general, una línea recta. Al fin y al cabo, si nuestro móvil se desplaza en línea recta, acelera a ritmo constante durante todo el camino y buena parte del mismo se mueve muy despacio, así que no parece descabellado que una trayectoria distinta, con un tramo inicial más próximo a la vertical que sirva para acelerar mucho al principio del camino, permita alcanzar el destino en menos tiempo.
Solución
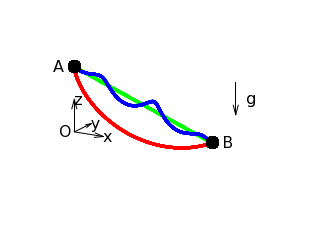
Algunas de las posibles trayectorias entre el punto de
origen A y el punto de destino B. Sin pérdida de generalidad, suponemos
que el eje x es horizontal y
está orientado del punto de origen al punto de destino, z es vertical y apunta hacia arriba (en
contra de la gravedad) y el eje y
es horizontal y orientado de modo que el triedro xyz está orientado a derechas.
Vamos a resolver este problema con las potentes técnicas del cálculo de variaciones. Definimos, en primer lugar, las siguientes variables:
- g ≡ valor absoluto de la aceleración gravitatoria;
- m ≡ masa del cuerpo;
- s ≡ longitud del arco recorrido por el cuerpo en su trayectoria;
- T ≡
energía cinética del cuerpo en su trayectoria:
T ≡ (1 ⁄ 2) m v2; - t ≡ tiempo transcurrido desde el comienzo del movimiento;
- Δt ≡
tiempo total de viaje desde el punto de origen hasta
el punto de destino:
Δt ≡ ∫ds ⁄ v; - V ≡
energía potencial del cuerpo en su trayectoria:
V ≡ m g z; - v ≡
rapidez del cuerpo:
v ≡ ((dx ⁄ dt)2 + (dy ⁄ dt)2 + (dz ⁄ dt)2)1 ⁄ 2 = ds ⁄ dt; - x ≡ coordenada horizontal longitudinal del cuerpo en su trayectoria;
- xA ≡ coordenada horizontal longitudinal del punto de partida;
- xB ≡ coordenada horizontal longitudinaldel punto de destino;
- y ≡ coordenada horizontal lateral del cuerpo en su trayectoria;
- yA ≡ coordenada horizontal lateral del punto de partida;
- yB ≡ coordenada horizontal lateral del punto de destino;
- z ≡ coordenada vertical del cuerpo en su trayectoria;
- zA ≡ coordenada vertical del punto de partida;
- zB ≡ coordenada vertical del punto de destino.
La ligadura que mantiene al cuerpo pegado a la rampa es holónoma
y no trabaja. No hay más interacciones aparte de la gravitatoria,
que es conservativa. Por lo tanto, la energía mecánica, igual
a la suma de las energías cinética T
y potencial V, se conserva. De las
expresiones dadas antes, se deduce la siguiente relación entre la
rapidez v y la posición vertical
z:
v = [2g (zA − z)]1 ⁄ 2.
Con esto, la dinámica está esencialmente resuelta y el problema
interesante, el del diseño de la braquistócrona, queda facilitado
en gran medida.
El tiempo que tarda el cuerpo en recorrer una longitud elemental
ds de arco es:
dt = ds ⁄ v.
Si integramos esta expresión entre el punto de partida
y el punto destino, obtenemos el tiempo total de viaje Δt:
Δt = ∫ds ⁄ v.
Con la expresión anterior de la rapidez despejada de la
ecuación de la energía total, el tiempo total de viaje queda
así:
Δt = ∫ds [2g (zA − z)]1 ⁄ 2.
Ahora vamos a expresar la anterior integral en función de
coordenadas conocidas. Hay varias maneras de hacerlo; nosotros
usaremos la coordenada vertical z
como variable independiente y de integración y supondremos que
podemos obtener una dependencia funcional para las otras dos
coordenadas: x(z) y z(z). Esta elección de variables
permite que los cálculos sean especialmente sencillos y tiene el
interés de no ser la más habitual, pero es singular en algunos
puntos que pueden ser de interés (donde la trayectoria es localmente
horizontal y en puntos estacionarios de la posición lateral); aun
así, la usaremos y a posteriori veremos que podemos prolongar la
solución más allá de estos puntos singulares. El elemento de
longitud es:
ds = [(dx ⁄ dt)2 + (dy ⁄ dt)2 + 1]1 ⁄ 2 dz.
El tiempo total de viaje toma esta forma:
Δt = ∫{[(dx ⁄ dt)2 + (dy ⁄ dt)2 + 1] ⁄ [2g (zA − z)]}1 ⁄ 2 dz.
A partir de aquí, la notación puede volverse un poco pesada. Para simplificar un poco las cosas, introducimos los siguientes símbolos:
- x′ ≡ dx ⁄ dz;
- y′ ≡ dy ⁄ dz;
- I(x′,y′;z) ≡ {[(x′)2 + (y′)2 + 1] ⁄ [2g (zA − z)]}1 ⁄ 2.
Con esta nueva notación, el tiempo de viaje toma una forma muy
compacta:
Δt = ∫I(x′,z′;z) dz.
La curva braquistócrona es la trayectoria que minimiza
el tiempo de viaje. En el entorno de la braquistócrona,
para variaciones infinitesimales arbitrarias (salvo en los
puntos de origen y destino, donde no hay variación) δx(z) y δy(z) de las coordenadas
horizontales x(z) y
y(z), la variación ∂Δt del tiempo de viaje Δt ha de anularse como condición
necesaria de mínimo:
∂Δt = 0 ∫(δx′ ∂I ⁄ ∂x′ + δy′ ∂I ⁄ ∂y′) dz;
∂Δt = −∫[δx (d ⁄ dz) ∂I ⁄ ∂x′ + δy (d ⁄ dz) ∂I ⁄ ∂y′] dz.
En la última expresión, hemos hecho uso del hecho de que los puntos
de origen y destino son fijos:
δx(zA) = δy(zA) = δx(zB) = δy(zB) = 0.
Como las variaciones son, por lo demás, arbitrarias, la integral
sólo puede ser nula si se cumplen las siguientes condiciones a lo largo
de toda la trayectoria:
(d ⁄ dz) ∂I ⁄ ∂x′ = 0;
(d ⁄ dz) ∂I ⁄ ∂y′ = 0.
Éstas son las ecuaciones de Euler-Lagrange del problema de diseño
de la braquistócrona.
Una vez obtenidas las ecuaciones diferenciales junto con sus
condiciones de contorno (que consisten en obligar a la curva a
partir del punto de origen y terminar en el punto de destino),
podemos pasar a integrarlas. Vemos que podemos integrar una vez
sin esfuerzo:
∂I ⁄ ∂x′ = Cx;
∂I ⁄ ∂y′ = Cy.
Cx y Cy son constantes de
integración que podemos relacionar de la siguiente manera con otro
juego de constantes C y φ:
Cx = C cos(φ);
Cx = C sin(φ).
Las ecuaciones quedan, una vez desarrolladas, de esta manera:
x′ = C cos(φ) {[zA − z] [1 + (x′)2 + (y′)2]}1 ⁄ 2;
y′ = C sin(φ) {[zA − z] [1 + (x′)2 + (y′)2]}1 ⁄ 2.
Ambas ecuaciones tienen la misma forma salvo por factores
constantes. Podemos expresar la coordenada lateral y en función de la coordenada longitudinal
x:
dy ⁄ dx = y′ ⁄ x′ = tan(φ).
Demostramos con esto que la braquistócrona es una
curva plana. Como elegimos los ejes de coordenadas de modo
que la coordenada lateral es nula tanto en el origen yA = 0 como en el
destino yB = 0,
deducimos que la coordenada lateral es nula a lo largo de toda
la trayectoria: y = 0.
Podemos suponer que cos(φ) = 1 y asumir que
la constante de integración C puede
tener cualquier signo.
Con todo esto, la ecuación diferencial es, finalmente:
x′ = C {[zA − z] [1 + (x′)2]}1 ⁄ 2.
Con unas pocas manipulaciones, la ecuación queda claramente
en variables separadas:
dx = dz C (zA − z)1 ⁄ 2 ⁄ [1 − C2 (zA − z)]1 ⁄ 2.
Vamos a hacer un cambio de variable: σ ≡ C (zA − z)1 ⁄ 2.
La ecuación diferencial queda así:
C2 dx = −2 σ2 dσ ⁄ (1 − σ2)1 ⁄ 2.
Esta ecuación pide a gritos otro cambio de variable: σ ≡ sin(θ).
Con este cambio, nuestra ecuación mejora significativamente su
aspecto:
C2 dx = −[1 − cos(2θ)] dθ.
Hagamos un último cambio para que la estética mejore un poquito:
η ≡ −2θ.
La ecuación adopta finalmente este aspecto tan sencillito:
2C2 dx = [1 − cos(η)] dη.
Ahora sólo queda hacer una integral que es inmediata. La curva
braquistócrona tiene esta forma en función de la variable η:
x = xA + [η − sin(η)] ⁄ (2C2);
z = zA − [1 − cos(η)] ⁄ (2C2);
ηA ≤ η ≤ ηB.
Ésta es la curva braquistócrona. Se trata de una
cicloide. Esta curva es algo más larga que un camino
recto, pero tiene la ventaja de que, al empezar en vertical,
permite que el móvil se mueva muy rápido desde muy pronto, lo
que compensa la longitud extra.
La braquistócrona es una curva cicloide.
Es fácil comprobar que la condición de contorno
de que la curva ha de pasar por el punto origen se cumple con
ηA = 0.
Las otras dos constantes C y ηB son algo más difíciles
de calcular y hay que conseguir sus valores numéricamente
o gráficamente. Puede ser útil introducir las variables auxiliares
r (la distancia entre el punto de
origen y el punto de destino) y m
(la pendiente de la línea recta entre el punto de origen y el punto
de destino) tales que:
r2 ≡ (xB − xA)2 + (zB − zA)2;
m ≡ (zB − zA) ⁄ (xB − xA).
Tenemos que resolver una ecuación trascendente para obtener
ηB en función de
m:
[cos(ηB) − 1] ⁄ [ηB − sin(ηB)] = m.
Una vez tenemos el valor de ηB, conocer
C (o, mejor, 1 ⁄ (2C2))
es fácil:
1 ⁄ (2C2) = r ⁄ [2 + ηB2 − 2ηB sin(ηB) − 2cos(ηB)].
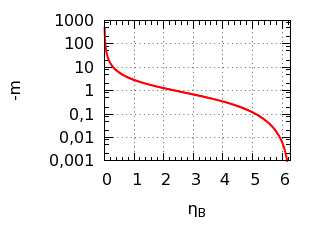
Relación entre la pendiente m de
la recta entre el punto de origen y el punto de destino y el parámetro
ηB del punto de destino.
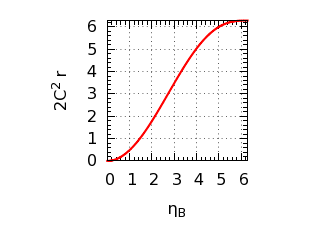
Relación entre el producto de la constante de integración 2C2 y la distancia recta r entre los puntos de origen y destino y
el parámetro ηB
del punto de destino. La singularidad en ηB = 0
es de primer orden y la singularidad en ηB = 2π es de
segundo orden.
¡A partir de cierto valor de m, la curva desciende por debajo de zB y luego vuelve a subir! En principio, tenemos un punto singular si expresamos la posición horizontal x en función de la posición vertical z y nuestro cálculo queda bajo sospecha. Por otra parte, x es una función monótona de η, así que parece que habría sido más riguroso deducir la ecuación diferencial con z en función de x. Habríamos llegado al mismo resultado, cosa que es fácil de comprobar.

Una trayectoria braquistócrona que desciende por debajo de la altura
del punto de destino.
Todavía no podemos darnos por satisfechos. Sabemos la forma de la
curva, pero no el tiempo de viaje. Afortunadamente, el cálculo no
tiene misterio después de haber llegado tan lejos. Lo único que
tenemos que hacer es usar lo que sabemos de la solución en la
expresión del tiempo de viaje:
t = ∫{[1 + (x′)2] ⁄ [2g (zA − z)]}1 ⁄ 2 dz;
t = ∫[2g (zA − z) (1 − C2)]−1 ⁄ 2 dz.
La anterior integral va desde el punto de origen hasta
un punto cualquiera de la curva para el que queremos saber
el tiempo de paso. Hagamos uso de la variable auxiliar σ que tan buenos resultados nos
dio antes:
t = ∫−[2 ⁄ (2C2 g)] (1 − σ2) dσ
= −2asin(σ) ⁄ (2C2 g)1 ⁄ 2.
Si cambiamos a la variable θ
y de ahí a la variable η,
tenemos la expresión final del tiempo empleado en llegar al punto
cuyo parámetro es η:
t = [1 ⁄ (2C2)]1 ⁄ 2 (η ⁄ √g).
El tiempo de viaje total Δt
es:
Δt = [1 ⁄ (2C2)]1 ⁄ 2 (ηB ⁄ √g).
Este tiempo es inferior al tiempo Δts que llevaría cubrir
la distancia entre origen y destino en línea recta:
Δts = r {2 ⁄ [(zA − zB) g]}1 ⁄ 2.
En efecto, si comparamos los tiempos, nos queda:
Δt ⁄ Δts = ηB {[1 − cos(ηB)] ⁄ [2ηB + 4 − 4ηB sin(ηB) − 4cos(ηB)]}1 ⁄ 2.
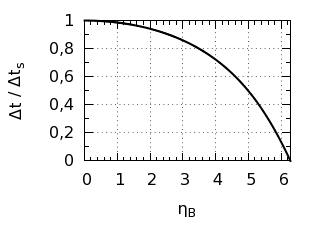
Duración de la trayectoria braquistócrona relativa a
la duración de la trayectoria recta. La braquistócrona
es más rápida (es decir, el tiempo de viaje Δt es más corto que el tiempo de
viaje Δts de la
trayectoria recta), tanto más cuanto más grande es el parámetro
ηB del punto de destino
(es decir, cuanto más pequeña es la pendiente de la trayectoria recta).
Categorías: Física, Matemáticas
Permalink: https://sgcg.es/articulos/2011/04/19/braquistocrona/
