Septiembre de 2011
Calendario de artículos de de 2011
| lu | ma | mi | ju | vi | sá | do |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 | ||
Teorema del transporte de Reynolds
2011-09-30
El teorema del transporte de Reynolds es una expresión matemática muy útil que relaciona integrales y derivadas y tiene grandes usos en la mecánica de medios continuos. En su aplicación a este campo, relaciona cómo varian las propiedades de una masa de control con cómo varían las propiedades de un volumen de control. ¡Un momento! ¿Qué es una masa de control y qué es un volumen de control?
- Masa de control
- Es una cierta cantidad de material a la que hacemos un seguimiento. Por lo tanto, una masa de control es un objeto físico igual que lo es una pelota, pero puede ser difícil distinguir una masa de control de su vecina (por ejemplo, es difícil distinguir una masa de agua de otra en medio del océano).
- Volumen de control
- Es un volumen al que hacemos un seguimiento. Las masas de control pueden atravesar un volumen de control. Los volúmenes de control son entidades geométricas que definimos aparte de los objetos físicos: por ejemplo, el interior de una caja es un volumen de control cuyo contenido, las masas de control que tiene dentro, puede variar con el tiempo.
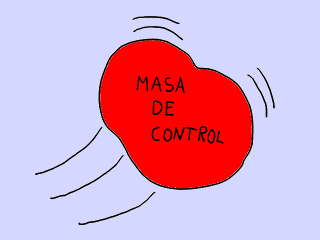
Masa de control. Es un volumen de material en movimiento.
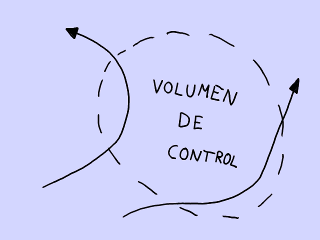
Volumen de control. Es virtual y el material lo atraviesa.
En general, el teorema del transporte de Reynolds relaciona el ritmo de variación en un dominio móvil (el de la masa de control) y un dominio fijo (el del volumen de control) o incluso entre varios volúmenes móviles. Es una generalización a dimensiones múltiples de la regla de Leibniz. En lo que sigue, usaremos volúmenes y superficies, pero en realidad el teorema es válido para dimensiones superiores e inferiores. La exposición estará centrada, sobre todo, en el concepto de la masa de control por su cómoda interpretación física.
Por qué usamos masas de control y volúmenes de control
A menudo, conocemos las leyes físicas que afectan a los objetos como las masas de control, pero poner en práctica este conocimiento puede ser muy engorroso. Por ejemplo, las ecuaciones del movimiento de una una masa de control de aire (las leyes de Newton y de conservación de la energía), aunque son conceptualmente muy sencillas, se vuelven muy difíciles de integrar porque la masa de control puede desplazarse mucho y acabar en cualquier parte. Como las ecuaciones del movimiento dependen de las masas de aire del entorno (lo hacen a través de la presión y los esfuerzos viscosos, por ejemplo) y estas masas de aire pueden cambiar mucho a cada momento, no es de extrañar que la tarea de calcular el comportamiento del aire (o el medio que sea) pueda volverse algo formidable con esta formulación.
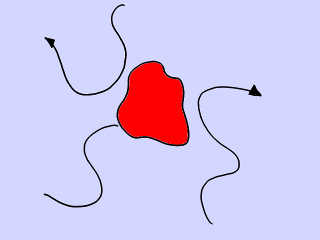
Las partículas vecinas de una masa de control pueden venir de
cualquier lugar y son muy difíciles de seguir.
Ahora imaginemos un volumen cualquiera, fijo o con un movimiento cómodo de manejar. Este volumen es un volumen de control y las masas de control pueden, en general, atravesarlo. Si pudiéramos referir las ecuaciones del movimiento no a las masas de control, sino al volumen de control, nuestros problemas quizá se volverían más fáciles de tratar. El teorema del transporte de Reynolds hace esto.
Propiedades extensivas y propiedades intensivas
Cojamos una masa de control cualquiera. En un instante
de tiempo t, la masa de
control tiene unas propiedades (cantidad de movimiento, masa,
energía interna…). Diremos que estas propiedades
son Cm(t).
Ahora bien, la masa de control ocupa un cierto volumen Vm(t).
Podemos suponer que la propiedad C(t), que llamaremos
extensiva, es la suma de una propiedad intensiva
c(t,x)
distribuida por los puntos x
del espacio ocupado por la masa de control:
Cm(t) = ∫∫∫Vm(t) c(t,x) dV.
En la anterior integral, el símbolo dV indica el elemento diferencial de
volumen.
Ritmo de variación de las propiedades de una masa de control
Las masas de control son objetos físicos normales y corrientes
como pelotas, bolígrafos y gotas de agua. Sus propiedades Cm(t) tienen un ritmo
de variación con el tiempo t que
es igual a un término forzante o fuente (la fuerza para la cantidad
de movimiento, por ejemplo) F:
dCm ⁄ dt = F.
Aunque no hemos escrito explícitamente las dependencias funcionales, el término forzante F variará, en general, con el tiempo, la región del espacio ocupada por la masa de control y la distribución de las variables físicas en el espacio y el tiempo. Esta distribución de las variables físicas estará determinada por cómo se hayan movido las masas de control (¡partícula por partícula!), así que el seguimiento se vuelve muy poco práctico.
Llega el teorema del transporte de Reynolds
Ahora, supongamos que tenemos un volumen de control fijo
V que en el preciso instante
t coincide con el volumen
Vm(t)
ocupado por la masa de control:
V = Vm(t).
La frontera del volumen de control es la superficie S.
Podemos integrar las variables intensivas c(t,x) en
este volumen para obtener las variables extensivas Cv(t) correspondientes:
Cv(t) = ∫∫∫V c(t,x) dV.
Un cortísimo instante más tarde, en el tiempo t+dt, los dos volúmenes no tienen por qué coincidir. Por lo tanto, el ritmo de variación de las variables extensivas en el volumen de control no tiene por qué coincidir con el ritmo de variación de las variables extensivas en la masa de control. Ahora bien, podemos relacionarlos.
Cada punto x de la
frontera de la masa de control se desplaza a una velocidad v(t,x).
La dirección normal (hacia el exterior) a la frontera
del volumen de control es el vector unitario n(x).
Por lo tanto, la velocidad normal vn(x)
a la que se separa la frontera de la masa de control de la del volumen
de control es
vn(t,x) = v(t,x) ⋅ n(x).
La frontera de la masa de control entra dentro del volumen de
control cuando la anterior expresión es negativa y sale cuando
es positiva.
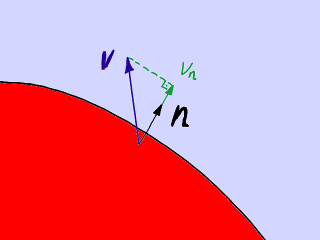
Velocidad normal a la frontera.
Cierta parte de la masa de control sale del volumen de
control, mientras que otra parte entra. Fijémonos en un punto
x de la frontera del
volumen de control. Definamos un elemento diferencial de
superficie de frontera dS
alrededor de este punto. Como el incremento de tiempo dt es extremadamente pequeño,
podemos despreciar cualquier variación de la velocidad v(t,x)
a la que se desplaza la frontera de la masa de control entre el
instante t y el instante t+dt. En este tiempo, habrá
entrado dentro del volumen de control una pequeña cantidad de material
de volumen
−vn(x) dt dS.
El signo negativo se debe a que, si la velocidad relativa es
negativa, el material entra, mientras que, si la velocidad relativa
es positiva, el material sale. Esta pequeña cantidad de material que
entra o sale lleva consigo cierta cantidad extensiva de propiedades
físicas:
−vn(x) dt dS c(t,x).
La suma (la integral) de esta contribución por toda la
superficie de la frontera del volumen de control será igual a
la cantidad de las variables extensivas que habrá entrado menos
la que habrá entrado en el volumen de control en el intervalo
de tiempo entre t y t+dt:
−dt ∫∫S c(t,x) vn(x) dS.
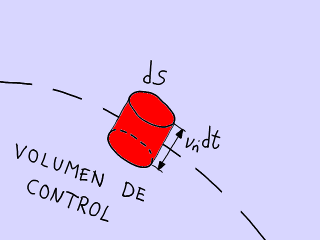
Elemento de una masa de control que atraviesa un volumen de
control. Equivale a la región barrida por un elemento de área en
su desplazamiento normal a la frontera en un corto intervalo de tiempo.
Con todo lo que sabemos, ya podemos relacionar el ritmo de
variación en la masa de control y el ritmo de variación en el volumen
de control. En concreto, el incremento en la variable extensiva Cv en el volumen de control
Cm en la masa de control
(que coincide en el espacio con el volumen de control en el instante
de interés) más lo que entra y menos lo que sale:
dCv(t) = dCm(t) − dt ∫∫S c(t,x) vn(t) dS.
Por otra parte, el ritmo de variación en el volumen de control
ha de ser igual a la suma (la integral) de los ritmos de variación
en su interior:
dCv(t) ⁄ dt = ∫∫∫V ∂(c ⁄ ∂t)(t,x) dV.
Juntémoslo todo y operemos mínimamente para mejorar el aspecto
estético del resultado. Nos queda la ecuación del transporte de
Reynolds:
(d⁄dt) ∫∫∫Vm(t) c(t,x) dV = ∫∫∫V (∂c⁄∂t)(t,x) dV + ∫∫S c(t,x) vn(x) dS.
El término de la izquierda de la igualdad es el ritmo de variación
dCm ⁄ dt
de las propiedades de la masa de control, igual al término forzante
F que vimos antes, pero ahora todo
es potencialmente más fácil porque usamos variables referidas no a
partículas materiales móviles, sino a puntos fijos del espacio.
Varios volúmenes móviles
En ninguna parte de las ecuaciones anteriores aparece el requisito de que el volumen móvil sea el ocupado por un objeto material. El volumen móvil puede ser un volumen de control cualquiera.
Si aplicamos el teorema del transporte de
Reynolds a dos volúmenes de control móviles V1(t) y V2(t) tales que ambos
coinciden en el preciso instante t
con el volumen de control fijo V,
obtenemos la siguiente relación:
(d⁄dt) ∫∫∫V1(t) c(t,x) dV
= (d⁄dt) ∫∫∫V2(t) c(t,x) dV)
+ ∫∫S c(t,x) [v1(t,x) − v2(t,x)] ⋅ n(x) dS.
Esta expresión es útil, por ejemplo, a la hora de tratar problemas
con frontera móvil tales como el comportamiento del fluido en el
interior de un motor alternativo.
Categorías: Física, Matemáticas
Permalink: https://sgcg.es/articulos/2011/09/30/teorema-del-transporte-de-reynolds/
Ondas planas y relaciones de dispersión
2011-09-25
Hace mucho tiempo desde la última vez que escribí un artículo sobre física y matemáticas. ¡Esto no puede seguir así!
Las ondas son fenómenos de propagación en el espacio y en el tiempo. Podemos usar el concepto de onda para describir numerosísimos fenómenos: las olas del mar, los rayos de luz, los sonidos, las moléculas de aire dentro de una cajita… todas estas cosas son ondas a efectos prácticos.
Hay muchos tipos de onda. En este artículo vamos a estudiar las ondas planas, que son ondas que avanzan en el espacio de modo que los frentes de onda son planos perpendiculares a la dirección de propagación. Para concretar, vamos a trabajar en este artículo con ondas planas sinusoidales. Es decir, si paramos el tiempo, notamos lo siguiente:
- la onda sube y baja sinusoidalmente si avanzamos en la dirección de propagación;
- la onda no cambia de valor si avanzamos en un plano perpendicular a la dirección de propagación.

Onda plana sinusoidal en un espacio bidimensional.
Vamos a introducir unos pocos símbolos matemáticos.
Usaremos el símbolo t
para hablar de la coordenada temporal, el símbolo
x para
hablar de las coordenadas espaciales, el símbolo A(t,x) para hablar
de la amplitud de la onda en función del tiempo y del espacio, ω para hablar de la pulsación angular
de la onda (lo rápido que pasa de subir a bajar y de bajar a subir)
y el símbolo k para hablar
del número de onda (un vector tan largo como la longitud de onda y
que apunta en la dirección de propagación). Con estos símbolos,
la amplitud A(t,x)
de la onda plana adopta esta forma tan sencilla:
A(t,x) = Ak ei(k⋅x−ωt).
La constante Ak es en
general compleja y, por lo tanto, contiene información tanto de
la amplitud como de la fase inicial de la onda. ¡Un momento!
El valor de esta onda es un número complejo. ¿Hay algún
problema en esto? ¡Por supuesto que no! Si la onda que estamos
midiendo sólo tiene un valor real, entonces tomamos la parte real
de la anterior expresión y asunto resuelto. Por cierto, tanto
A(t,x) como Ak pueden ser
escalares, vectores, tensores, espinores o cualquier otro tipo de
objeto matemático que sirva para nuestro modelo físico. Si
superponemos ondas planas en diferentes direcciones y con diferentes
parámetros, podemos reconstruir ondas de formas complicadas.
Esta expresión de la onda plana está muy bien, pero tenemos que relacionarla de alguna manera con el fenómeno físico que estamos modelando. ¡Hay muchos fenómenos que no admiten ondas planas como soluciones! ¿Cuáles sí lo hacen? En general, fenómenos de campos lineales y no estacionarios que suceden en un espacio y un tiempo infinitos. Las ondas planas son buenos modelos para la propagación de la luz en el vacío, por ejemplo, o para las olas en la superficie de un océano inmenso. Todos estos fenómenos están modelados mediante ecuaciones de campo, que pueden ser de muy diversos tipos: diferenciales, integrales, variacionales… Lo que tenemos que hacer es introducir la solución de onda plana en las ecuaciones de campo y ver qué propiedades han de cumplir la amplitud Ak, la pulsación ω y el número de onda k para verificar las ecuaciones. Estas relaciones serán unas relaciones de compatibilidad (por ejemplo, las que dictan que el campo magnético y el campo eléctrico son perpendiculares en un rayo de luz) y unas relaciones de dispersión que indican cómo están relacionados el número de onda y la pulsación.
Ejemplo: ecuación de ondas unidimensional
La ecuación de ondas unidimensional es muy famosa y muy fácil de
resolver. Es el prototipo de ecuación hiperbólica de segundo orden.
Sus soluciones se propagan en el espacio hacia adelante y hacia atrás
sin pérdidas. Esta ecuación sirve para modelar fenómenos tan
aparentemente dispares como el sonido en un pasillo largo y estrecho,
un rayo de luz y el campo de velocidades alrededor de un obstáculo
bidimensional y muy delgado en una corriente de aire supersónica
(en este caso, la dirección de la corriente actúa a modo de «tiempo»
y la dirección perpendicular al obstáculo actúa a modo de «espacio»).
Para un campo u(t,x),
la ecuación de ondas es ésta:
∂2u ⁄ ∂t2 + c2 ∂2u ⁄ ∂x2 = 0.
La constante c es la rapidez a la
que se propagan las ondas.
Introduzcamos la solución de onda plana
u(t,x) = uk ei(kx−ωt)
en la ecuación de ondas. Tras operar un poco, obtenemos
la siguiente relación de dispersión:
ω2 − c2 k2 = 0.
Según esto, la pulsación ω
y el número de onda k son directamente
proporcionales.
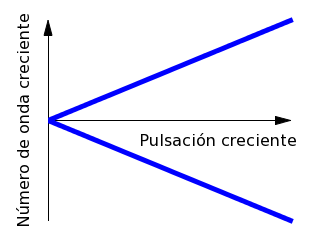
Relación de dispersión de la ecuación de ondas unidimensional.
Ejemplo: ecuación de Schrödinger de la partícula libre
La ecuación de Schrödinger sirve para modelar el comportamiento de
pequeñas partículas no relativistas y olas de pequeña amplitud en la
superficie del agua (aunque la ecuación de Schrödinger para las olas
del agua en el régimen interesante tiene un término no lineal). Con
las unidades adecuadas, la ecuación de Schrödinger para un campo libre
u(t,x) es ésta:
i ∂u ⁄ ∂t = −∇2 u.
El operador ∇2 es
la laplaciana, la suma de las derivadas segundas en todas las direcciones
del espacio.
Introduzcamos la solución de onda plana
u(t,x) = uk ei(k⋅x−ωt)
en la ecuación de campo. Tras unas sencillas operaciones, obtenemos
la siguiente relación de dispersión:
ω = k ⋅ k.
En este caso, la relación entre la pulsación y el número de onda es no lineal. Se dice que la ecuación de campo es dispersiva, ya que ondas de distinta frecuencia se propagan a velocidades distintas.
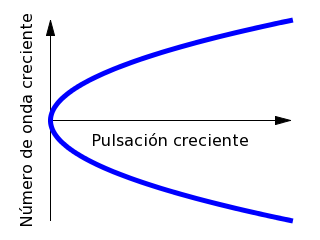
Relación de dispersión de la ecuación de Schrödinger libre.
Ejemplo: acústica
Para terminar, vamos a ver cómo se comportan dos campos acoplados,
el de presión y el de velocidades, como pequeñas perturbaciones en
un gas ideal estacionario. El campo de perturbaciones de presión
es p(t,k)
y el campo de velocidades de perturbación es u(t,x).
Es llegar a las ecuaciones de campo que, en las unidades adecuadas
(en concreto, la presión está expresada en unidades de la presión
de la atmósfera en calma dividida por la densidad de la atmósfera
en calma), son así de bonitas:
a−2 ∂p ⁄ ∂t + ∇ ⋅ u = 0;
∂u ⁄ ∂t + ∇p = 0.
La constante a es la rapidez del
sonido.
Introduzcamos la solución de onda plana
p(t,x) = pk ei(k⋅x−ωt);
u(t,x) = uk ei(k⋅x−ωt)
en las ecuaciones de campo. Tras unas pocas manipulaciones, obtenemos
lo que sigue:
−a−2 ω pk + k ⋅ uk = 0;
−ω uk + k pk = 0.
Tras manipular un poco, nos queda este par de relación de
compatibilidad y relación de dispersión:
uk = (k ⁄ k) (pk ⁄ a);
ω = a k.
En las ecuaciones anteriores, k
es el módulo del vector de número de onda k. La relación de dispersión
es como la que obtuvimos para la ecuación de ondas unidimensional.
Para una pulsación dada, todos los números de onda que cumplen
la relación de dispersión forman una esfera. La relación de
compatibilidad dice que las velocidades de perturbación van en la
dirección de propagación de la onda acústica y que su magnitud es
proporcional a la de la perturbación de presión.
Categorías: Física, Matemáticas
Permalink: https://sgcg.es/articulos/2011/09/25/ondas-planas-y-relaciones-de-dispersion/
Equinoccio de septiembre
2011-09-23
Hoy, a las 09:04 UTC, tuvo lugar el equinoccio de septiembre. Como aproximación algo grosera, podemos decir que hoy el día y la noche duran lo mismo (¡pero el día es un poquito más largo que la noche!). El eje de rotación de la Tierra está «de perfil» al Sol y los polos están equidistantes. Damos la bienvenida al otoño en el hemisferio norte y a la primavera en el hemisferio sur.
Categorías: Fechas
Permalink: https://sgcg.es/articulos/2011/09/23/equinoccio-de-septiembre/
Los servicios públicos también benefician a quienes no los usan directamente
2011-09-22
Últimamente escucho afirmaciones como ésta:
Si yo llevo a mis hijos a una escuela privada, entonces quiero dejar de pagar con mis impuestos la educación pública.
En estas palabras se encuentra implícita una notable suposición: que el usuario del servicio privado no obtiene beneficio del servicio público. Esta suposición es absolutamente errónea. Veamos por qué. Los servicios públicos (financiados mediante impuestos con los que, de forma solidaria, cada contribuyente paga según su capacidad) surgen para cubrir áreas tan fundamentales como la educación y la sanidad. Si el usuario de servicios privados deja de aportar lo que le corresponde para el mantenimiento de los servicios públicos, entonces hay que aumentar la carga de los usuarios restantes o reducir el coste del servicio, lo que, si la gestión es buena, sólo es posible mediante una reducción de la calidad, que es precisamente lo que se hace en estos momentos. Ahora bien, los servicios privados no son una opción para muchos que carecen de la capacidad económica para pagarlos, de modo que el deterioro de los servicios públicos penaliza especialmente a los pobres. Si nos centramos en la sanidad y en la educación, tenemos los siguientes escenarios:
- La reducción de la calidad de la sanidad pública supone un deterioro del estado de salud general de la población. Incluso si ignoramos la tragedia humana, esto es problemático para el usuario de la sanidad privada, ya que aumenta el riesgo de contagio de enfermedades y la productividad general de la masa trabajadora disminuye, lo que supone una carga indeseable para la economía nacional.
- La reducción de la calidad de la educación pública empeora la cualificación general de la masa laboral. Esto se traduce en un empobrecimiento no sólo de quienes reciben una eduación inadecuada, sino de toda la nación en general, ya que no es posible generar y mantener puestos de trabajo e industrias de alto valor añadido. Surge, además, un círculo vicioso al disminuir el presupuesto (recaudado por vía impositiva) disponible para financiar la educación pública. Si el usuario de la educación privada que no paga impuestos realiza una actividad económica mínimamente significativa con sus conciudadanos, entonces se verá penalizado por esto.
- La reducción de la calidad de la educación pública frente a la educación privada crea una brecha social que se realimenta. Esto está correlacionado positivamente con un incremento en las tasas de criminalidad, lo que aumenta la inseguridad de todos esos usuarios de la educación privada que no pagan impuestos.
Por estos motivos puramente egoístas, el usuario de los servicios privados tiene mucho que perder si deja de financiar los servicios públicos.
Categorías: Miscelánea
Robot con una planta
2011-09-20

Imagen PNG en 256 tonos de gris, 800 píxeles de ancho y 922
píxeles de alto, 63,3 kB.
He aquí el dibujo de un robotito que sujeta una maceta con una planta.
Este dibujo es una continuación de los muy azucarados amor robot, más amor robot, robotito enfermo, fiesta robot, robotito que quiere un abrazo y conga robot.
Categorías: Dibujos
Permalink: https://sgcg.es/articulos/2011/09/20/robot-con-una-planta/
Día de Hablar como un Pirata
2011-09-19
¡Avante toda, señor incauto lector! Por mis barbas que éste es el Día Internacional de Hablar como un Pirata.
Categorías: Fechas
Permalink: https://sgcg.es/articulos/2011/09/19/dia-de-hablar-como-un-pirata/
Día de la Libertad del Software
2011-09-17
Hoy es el Día de la Libertad del Software. Se celebra todo lo relacionado con el software libre.
El software libre es vital para mantener nuestros derechos en un mundo cada día más dependiente de los sistemas informáticos. El concepto del software libre es un concepto ético que se fundamenta en la generosidad y la difusión del conocimiento.
El software libre ofrece no sólo una utilidad práctica inmediata, sino que además puede:
- ser utilizado con total libertad, con cualquier propósito;
- ser estudiado y modificado: podemos crear formas variantes de un programa de software libre o contratar a alguien para que las haga y podemos estudiar cómo funciona para hacernos más sabios y habilidosos;
- ser distribuido con total libertad: podemos prestarle ayuda a nuestro vecino y entregarle una copia del software libre al que tenemos acceso;
- ser distribuido también en formas modificadas: si hicimos cambios a un programa de software libre, por ejemplo para adaptarlo a las necesidades de la gente de nuestro entorno, podemos compartir estos cambios con nuestros semejantes.
En resumen, el software libre está hecho pensando en las personas. Y no es malo para los negocios, no. Por ejemplo, Internet sería muy distinta sin el software libre.
Categorías: Derechos, Fechas, Informática
Permalink: https://sgcg.es/articulos/2011/09/17/dia-de-la-libertad-del-software/
Collar hecho con resistencias
2011-09-15
Debido a un problema de comunicación en una tienda de electrónica, acabé con doscientos gramos de resistencias de diferentes tipos. Además de los usos evidentes, surgió una posibilidad muy interesante: ¡hacer un collar! Las resistencias forman eslabones y en el centro hay una medallita hecha con estaño de soldar.

El collar. Quizá no es el más fino del mundo, pero está hecho
con cariño.

Una voluntaria muestra el collar en acción.
Categorías: DIY
Permalink: https://sgcg.es/articulos/2011/09/15/collar-hecho-con-resistencias/
Mantis
2011-09-14

Imagen PNG en 256 tonos de gris, 800 píxeles de ancho y 867
píxeles de alto, 74,0 kB.
Durante las últimas horas me encontré con varias mantis. Una de ellas decidió pasear por mi techo, mientras que la otra estaba haciendo su vida en la calle. La última se asustó un poco cuando me acerqué a ella. Tenía el aspecto de este dibujo.
Categorías: Dibujos
Permalink: https://sgcg.es/articulos/2011/09/14/mantis/
Proyecto de electrónica con microcontrolador: termómetro animado
2011-09-12
Un colorido termómetro animado: ¡el Termometronator!
Vamos a construir un vistoso termómetro digital que mostrará la temperatura con un vistoso juego de luces animadas. Nuestro diseño se descompone en tres componentes básicos:
- un módulo termométrico;
- un módulo de representación de datos;
- un módulo de control.
Para ser más específicos, nuestro diseño general es como sigue:
- Módulo termométrico:
- está formado por un sensor termométrico como el LM35.
- Módulo de representación de datos:
- está formado por un visualizador luminoso de siete segmentos y tres leds de colores.
- Módulo de control:
- Está formado por una tarjeta Arduino. Arduino es una popular familia de tarjetas con microcontroladores.
Módulo termométrico
El módulo termométrico es muy sencillo. Está formado por un
sensor termométrico LM35 que podemos conectar directamente a una
entrada analógica del microncontrolador. El sensor elegido no es
muy caro y tiene una calibración muy cómoda de usar: la temperatura
(T) medida en Celsius es igual a la
tensión de salida (V) en decenas
de milivoltios:
T = V ⋅ 0,1 °C ⁄ mV.
En unidades más civilizadas, la conversión es ésta:
T = 271,15 K + V ⋅ 0,1 K ⁄ mV.
El conector va conectado directamente al módulo microcontrolador. Como éste tiene un conversor analógico-digital de mil veinticuatro niveles para un rango de 0 V a 5 V, las medidas tienen una granularidad de aproximadamente 0,5 K. Si queremos algo más fino, necesitamos hacer un montaje algo más sofisticado.
Módulo de representación de datos
Usamos un visualizador luminoso de siete segmentos para mostrar la temperatura (medida en °C) en base 10. Como sólo usamos un visualizador, sólo podemos mostrar una cifra a un tiempo, pero esto no supone problema alguno, ya que podemos alternar la cifra que mostramos de forma cíclica:
- primero las decenas;
- luego las unidades;
- luego las décimas.
Para saber qué cifra estamos mostrando, usamos tres leds:
- uno verde que se enciende cuando mostramos las decenas;
- uno amarillo que se enciende cuando mostramos las unidades;
- uno rojo que se enciende cuando mostramos las décimas.
Los leds, tanto del visualizador de siete segmentos como los que indican el orden de la cifra, han de estar protegidos mediante resistencias. Con una placa con salidas de 5 V y leds con una caída de tensión de entre unos 1,6 V y unos 2,0 V, suele ser adecuado poner resistencias de 330 Ω. Las salidas digitales de la placa Arduino usada (con un microcontrolador Atmega8) aguantan una intensidad de hasta 40 mA, así que estamos en el lado seguro con esta protección.
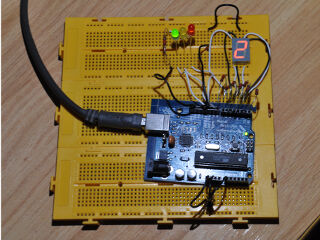
Conexión al módulo de control
La tarjeta Arduino tiene catorce conectores digitales (numerados del 0 al 13) y seis conectores analógicos (numerados de A0 a A5), además de tomas de tierra y de tensión de alimentación a 5 V.
Usaremos los conectores digitales del 2 al 8 para controlar los segmentos de la a a la f del visualizador de siete segmentos, mientras que el conector 9 controlará el led de las décimas, el 10 controlará el led de las unidades y el 11 controlará el led de las decenas. Hay dos posibilidades de conexión y uso del visualizador de siete segmentos:
- si es de ánodo común, usaremos el conector de tensión de 5 V para dar la tensión alta en el ánodo y activaremos los segmentos poniéndolos en baja;
- si es de cátodo común, usaremos el conector de tierra en el cátodo y activaremos los segmentos poniéndolos en alta.
En cuanto al módulo termométrico, conectaremos su alimentación a las tomas de 5 V y tierra y su salida a la entrada analógica A0.
La siguiente imagen muestra la conexión si el visualizador de siete segmentos es de ánodo común. Si es de cátodo común, la conexión a la toma de 5 V ha de ser reemplazada por una a la tierra («GND»).

La tarjeta Arduino también tiene comunicaciones en serie, tanto a través de USB como a través de los conectores digitales 0 y 1. Podemos usar estas comunicaciones para diagnosticar el funcionamiento del aparato, lo que nos lleva al tema de la siguiente sección, el software.
Software del módulo de control
El software, que podemos compilar y guardar en el Arduino con el
entorno de desarrollo del proyecto o directamente con un compilador
para AVR y el software avrdude, está disponible aquí:
termometronator.pde
La primera línea define si estamos usando un visualizador de ánodo común o de cátodo común:
- ánodo común:
#define common_anode 1- cátodo común:
#define common_anode 0
El programa realiza unas tareas de arranque en la función
setup y después entra en un bucle en la función
loop. Esta última función llama a otras que hacen
el trabajo sucio: leer el sensor y mostrar los datos. Hay un
tiempo de espera de 500 ms entre
cada paso de la animación.
El código es fácil de entender, pero quizá no es tan compacto y poco exigente en memoria como podría ser. Los nombres de las funciones y las variables están en inglés, que es el idioma correcto para dirigirse a una máquina.
Categorías: Electricidad, DIY
Conga robot
2011-09-05

Imagen PNG en 256 tonos de gris, 800 píxeles de ancho y 597
píxeles de alto, 51,9 kB.
Relajémonos un poco con estos robotitos que están bailando la conga.
Este dibujo es una continuación de los muy azucarados amor robot, más amor robot, robotito enfermo, fiesta robot y robotito que quiere un abrazo.
Categorías: Dibujos
Permalink: https://sgcg.es/articulos/2011/09/05/conga-robot/
La diferencia entre «asocial» y «antisocial»
2011-09-04
Aunque suenan de forma similar, las palabras «asocial» y «antisocial» tienen significados muy diferentes:
- Asocial
- Que no se integra en la sociedad.
- Antisocial
- Que se opone a la sociedad o al orden social.
Así, una persona con dificultades para integrarse en la sociedad y un ermitaño pueden ser asociales, pero no tienen por qué estar en contra del orden social; por otro lado, un individuo antisocial puede estar perfectamente integrado, pero se opone al orden social, quizá con violencia. Se trata de dos conceptos claramente diferentes y es frecuente confundirlos.
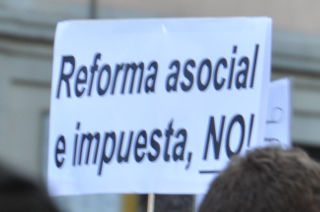
Este cartel, fotografiado en una de las frecuentísimas
manifestaciones de los últimos tiempos, tiene un error importante:
donde pone «asocial», tendría que poner «antisocial», pues se refiere
a una reforma que daña a la sociedad y al orden social.
Categorías: Lingüística
Permalink: https://sgcg.es/articulos/2011/09/04/la-diferencia-entre-asocial-y-antisocial/
