Placa Buggy 1: un cochecito teledirigido (4)
2012-06-08
En anteriormente vimos los requisitos de diseño, la configuración general y el concepto electrónico general del cochecito teledirigido Placa Buggy 1. Hoy vamos a ver el diseño de la planta motriz.
Motores
Dos micromotores independientes proporcionan la tracción. Uno mueve la rueda principal izquierda y el otro mueve la rueda principal derecha. Estos micromotores vienen con un mecanismo reductor incorporado y el conjunto es muy compacto: miden 24 mm de longitud y tienen una sección de 10 mm por 12 mm. El eje tiene un diámetro de 3 mm. Estos motores son el modelo 50:1 micro de carcasa metálica del fabricante Pololu. Esta reducción es demasiado pequeña y el cochecito avanza a casi 1 m ⁄ s con los motores en operación continua, así que hay que activarlos intermitentemente para limitar la rapidez. Habría sido mejor usar motores con mayor reducción, pero los que estaban disponibles eran éstos.
Cada uno de los motores tiene un consumo en parada de 360 mA con alimentación a 6 V. Este número es dimensionante para el sistema de alimentación de los motores.
Ruedas y suspensión
El Placa Buggy 1 tiene una configuración triciclo con una rueda loca delantera que gira en cualquier dirección y dos ruedas principales traseras con neumáticos de caucho. Las ruedas traseras van unidas directamente a los ejes de salida de las reductoras. La rueda loca delantera es la de media pulgada de plástico del fabricante Pololu. Las ruedas principales son las de 70 mm por 8 mm del mismo fabricante; vienen en pares y con neumáticos y casan con los ejes de 3 mm de los motores.
No hay exigencias importantes en la suspensión de un cochecito lento que ha de moverse en interiores por superficies eminentemente planas. La rueda delantera va montada en un resorte plano de termoplástico ABS, mientras que los motores de las ruedas traseras están sujetas mediante portamotores también de termoplástico ABS. Las piezas de ABS van ancladas a la placa de baquelita que forma la estructura principal mediante cable unifilar pelado y soldado a puntos de cobre de la misma placa. Los portamotores son menos flexibles que el resorte plano delantero, pero una pequeña holgura en los cables de anclaje permite cierto movimiento y, con ello, que todas las ruedas permanezcan en contacto con el suelo en presencia de pequeñas irregularidades.
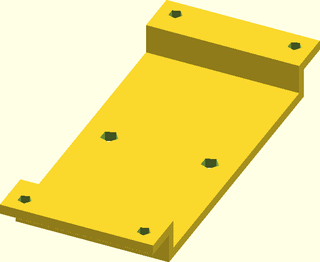
Suspensión de la rueda loca.
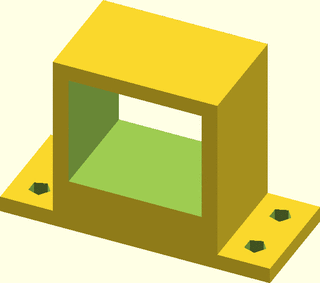
Portamotores.
Antes de realizar la suspensión de ABS, hubo una primera prueba con piezas hechas con láminas de papel apiladas y envueltas en cinta de carrocero. Con esta técnica de construcción salen piezas quizá un poco toscas, pero funcionalmente aceptables.
Control y alimentación de los motores
Una solución adecuada para el control bidireccional de un motor de corriente continua es el puente en H, un circuito que alimenta los devanados del motor en un sentido o en el opuesto en función de las señales de control. En el caso del Placa Buggy 1, los motores van alimentados por el circuito integrado L293, un doble puente en H que puede mover intensidades de 1 A.
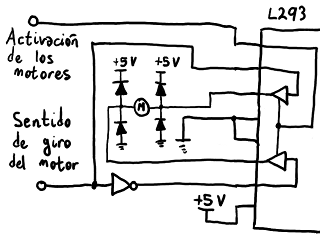
Mitad del circuito de control de los motores. El inversor lógico
está descrito más adelante.
Cada uno de los lados del L293 tiene dos entradas de control. Para hacer girar un motor, las entradas de su lado han de ser complementarias: la primera alta y la segunda baja para girar en un sentido y la primera baja y la segunda baja para girar en el otro sentido. Además de esto, hay una entrada de habilitación para cada lado; esta entrada tiene que ponerse alta para alimentar el motor correspondiente. En total, tenemos seis líneas, pero podemos hacer el control sólo con tres salidas del microcontrolador. En primer lugar, activaremos y desactivaremos ambos motores simultáneamente, así que podemos unir las líneas de habilitación. Por otra parte, pondremos en cada lado sus dos entradas con niveles complementarios, así que realmente sólo es necesario usar en cada lado una línea del microcontrolador con un inversor que podemos improvisar con un transistor.
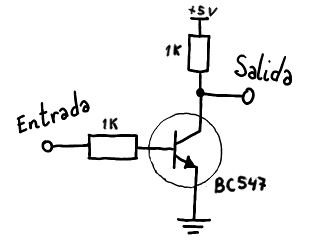
Inversor lógico. El transistor elegido es uno BJT modelo BC547
y los resistores son de 1 kΩ.
Cumplen con su función y estaban disponibles en inventario.
Las salidas del L293 van protegidas frente a sobretensiones mediante varios diodos. En cada borne del motor, un diodo conecta con polaridad directa hacia la alimentación y con polaridad inversa desde la tierra. Con esta solución se evita que la tensión en los bornes del motor suba por encima de un salto de diodo por encima de la alimentación o baje por debajo de un salto de diodo de la tierra. El L293 tarda unos 250 ns en conmutar, así que un diodo como el 1N4007, quizá lento al bloquear pero suficientemente rápido al pasar a conducción (con un tiempo de recuperación de unos nanosegundos), es más que suficiente sin que tengamos que preocuparnos por las constantes de tiempo de los motores. Esto es ventajoso porque el 1N4007 es muy fácil de conseguir.
Otros artículos de esta serie
- Presentación y requisitos de diseño.
- Configuración general.
- Concepto electrónico general.
- Señales acústicas y luminosas.
- Sistema de control remoto.
- Diseño del programa de control.
- Lista de componentes.
- Código fuente, planos, instrucciones de montaje e instrucciones de uso.
Categorías: DIY, Electricidad
Permalink: https://sgcg.es/articulos/2012/06/08/placa-buggy-1-un-cochecito-teledirigido-4/
