Placa Buggy 1: un cochecito teledirigido (9)
2012-06-19
En anteriores artículos vimos la presentación y los requisitos de diseño del cochecito teledirigido Placa Buggy 1; la configuración general; el concepto electrónico general; la suspensión, la planta motriz y el sistema de actuación y alimentación de dicha planta; las señales acústicas y luminosas; el sistema de control remoto; el diseño del programa de control; y la lista de componentes. En la entrega de hoy presentamos el código fuente del programa de control, los esquemas electrónicos y los diseños de placas de circuito y piezas y las instrucciones de montaje y uso.
Código fuente
El código fuente del programa de control y de los esquemas eléctricos
está disponible en forma de tarball comprimido:
placa-buggy-1.tar.gz
El contenido de este archivo es el siguiente:
- README
- Fichero de texto con instrucciones en inglés.
- COPYING
- Fichero de texto con los términos de la licencia copyleft utilizada (la GPL versión 3).
- Makefile
- Contiene el guión de make para construir el programa de control y actualizar los diseños de las placas de circuito.
- asm/
- Este directorio contiene el código fuente del programa de control. Está en lenguaje ensamblador para microcontroladores PIC de 8 bits.
- sch/
- Este directorio contiene los esquemas eléctricos en el formato de gschem (parte del proyecto gEDA, software libre para el diseño de circuitos electrónicos).
- pcb/
- Este directorio contiene los diseños de las placas de circuito en el formato de PCB (parte del proyecto gEDA, software libre para el diseño de circuitos electrónicos).
- scad/
- Este directorio contiene los diseños de la pieza de suspensión de la rueda loca y de los portamotores en el formato de OpenSCAD (software libre para diseño geométrico de piezas por medio de un lenguaje de programación especializado).
- stl/
- Aquí van los modelos de las piezas en formato STL. Hay que compilar estos modelos a partir de los originales de OpenSCAD.
- dxf/
- Aquí van los dibujos a dos vistas de las piezas con fines ilustrativos.
Compilación del programa de control
El programa de control está elaborado en lenguaje ensamblador para
microcontroladores PIC de 8 bits. Hay varios ensambladores para este
lenguaje. El Makefile contiene instrucciones para utilizar
GPUTILS. En sistemas
*nix, basta con revisar el Makefile y ejecutar la siguiente
orden:
make
Programación del microcontrolador
Una vez compilado el código (que va al fichero binario
buggy.hex), el siguiente paso consiste en
programar el microcontrolador. El Makefile
contiene una directiva que puede ser usada para escribir en
la memoria de programa del microcontrolador con un PICkit 2
(o un dispositivo compatible) mediante la herramienta PK2CMD.
La orden es la siguiente:
make uplink
El PICkit 2 se usa frecuentemente con dispositivos que disponen de terminales para programación directa en el propio circuito (lo que se conoce como «ICSP», 'In-Circuit Serial Programming'). El Placa Buggy 1 no tiene estos terminales, pero es muy fácil improvisar un adaptador, tal como vimos el pasado mes de octubre.
Limpieza del árbol de código
Si se desea limpiar el árbol de código de todos los ficheros binarios
y auxiliares (también los ficheros auxiliares de diseños de las placas
de circuito y las mallas STL de las piezas de la suspensión), simplemente
hay que escribir:
make clean
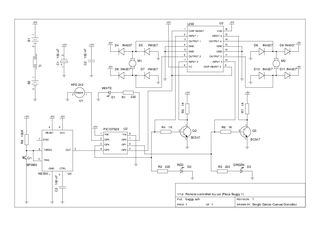
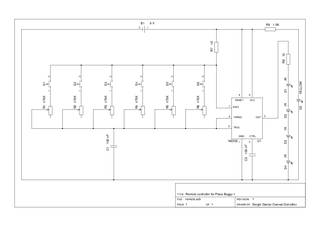
Esquemas electrónicos
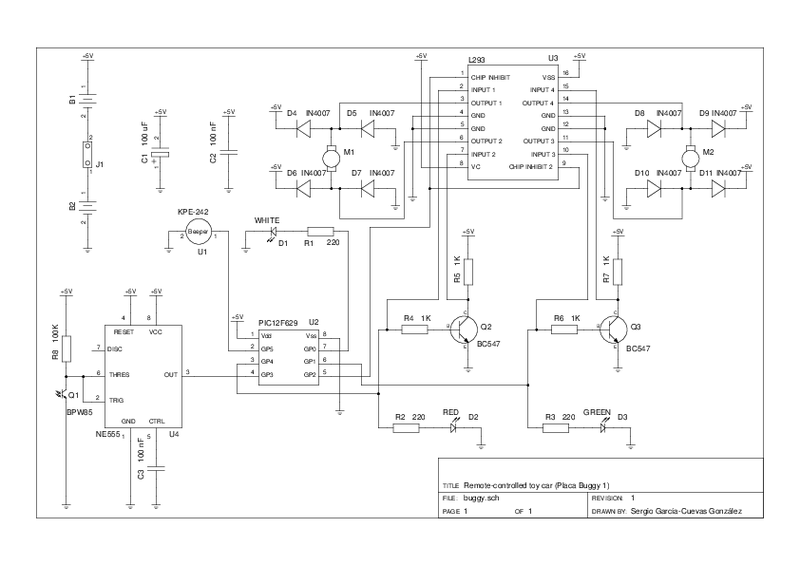
Los esquemas electrónicos en formato editable están en el archivo de código fuente. Hay dos esquemas:
- sch/buggy.sch: para el coche;
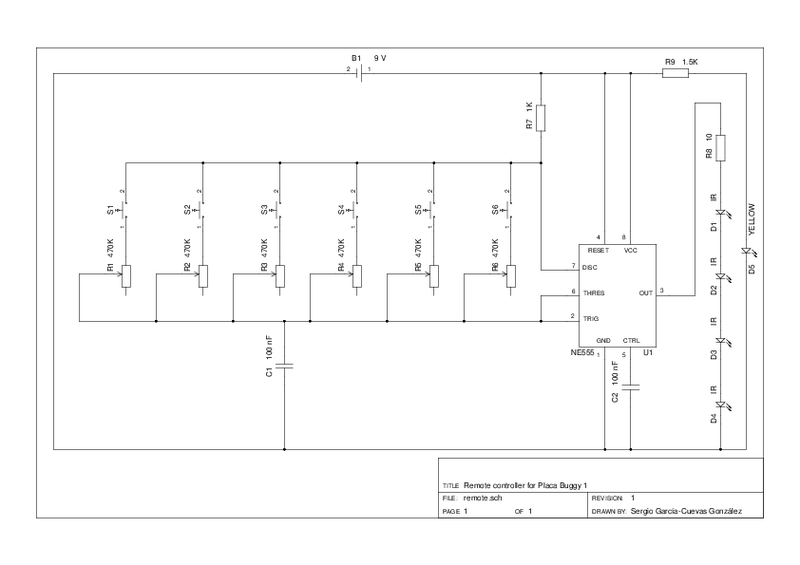
- sch/remote.sch: para el mando de control remoto.
Los esquemas están en el formato de gschem; gschem es parte del proyecto gEDA.
Los enlaces que siguen son a imágenes en diferentes formatos.
Esquema electrónico del cochecito
Esquema del mando a distancia
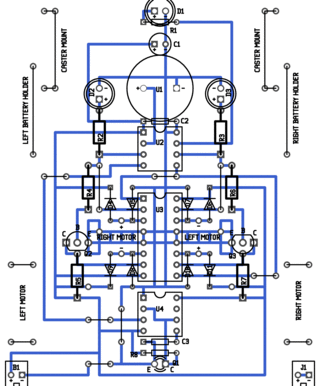
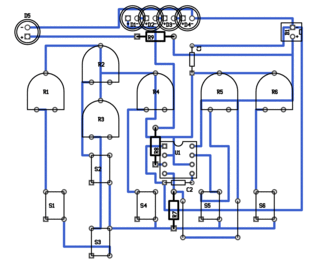
Diseño de las placas de circuito
Las placas del cochecito y del mando a distancia pueden ser tanto circuitos impresos como placas de puntos o de pistas continuas para prototipos, ya que las pistas están ajustadas a un retículo de 2,54 mm como el de las placas de prototipado. En el caso de usar una placa de puntos, es posible hacer las pistas mediante puentes de estaño entre los puntos; en el caso de usar una placa de pistas continuas, sólo es necesario hacer puentes en una dirección.
Los diseños editables están en el archivo de código fuente. Hay dos diseños:
- pcb/buggy.pcb: para el coche;
- pcb/remote.pcb: para el mando de control remoto.
Estań en el formato de la herramienta PCB.
Es posible actualizar (mediante gsch2pcb) los diseños
de las placas de circuito a partir de cambios realizados en los
esquemas de gschem. Basta con hacer
make pcb/buggy.pcb
(para actualizar la placa del coche) o
make pcb/remote.pcb
(para actualizar la placa del mando a distancia).
Los enlaces que siguen son a imágenes en diferentes formatos.
Placa del cochecito
Placa del mando a distancia
Suspensión y portamotores
Los diseños tridimensionales editables están en el archivo de código fuente. Hay dos ficheros:
- scad/motor_holder.scad: para los portamotores;
- scad/caster_mount.scad: para la suspensión de la rueda loca.
Los modelos están en el formato de OpenSCAD.
Estos modelos están pensados para fabricar las piezas con una
máquina de control numérico (no hace falta irse a una fábrica;
una RepRap, por
ejemplo, está al alcance de muchos aficionados). Los programas de
manejo de las máquinas de control numérico suelen aceptar mallas en
formato STL como entrada a partir de la que construyen la secuencia
de órdenes a enviar a la máquina de fabricación. Hay reglas en
el Makefile para generar las mallas a partir del código
fuente en el formato de OpenSCAD:
make stl/motor_holder.stl
(para generar stl/motor_holder.stl, la malla del
portamotores) o
make stl/caster_mount.stl
(para generar stl/caster_mount.stl, la malla de
la suspensión de la rueda loca).
Siguen los dibujos a dos vistas de las piezas.
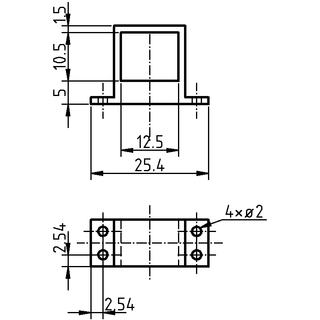
Portamotores.
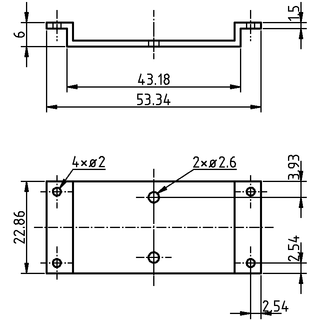
Suspensión de la rueda loca.
Estos dibujos están en formato editable en los ficheros siguientes:
- dxf/motor_holder.dxf: portamotores;
- dxf/caster_mount.dxf: suspensión de la rueda loca.
El formato es DXF. Muchos programas de diseño asistido por ordenador pueden abrir este formato. Los dibujos están generados con LibreCAD.
Montaje del coche
Los esquemas electrónicos y los diseños de las placas sirven como guía para colocar los componentes. En caso de usar placas perforadas para prototipos, es posible hacer las pistas con puentes de estaño.
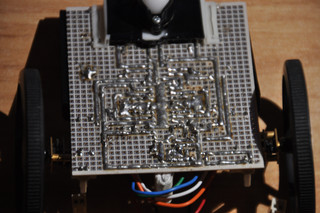
Lado de la soldadura del cochecito ejecutado en una placa perforada.
Algunos puntos de cobre sufrieron deterioro durante el montaje, pero
fue posible plasmar físicamente el diseño de las pistas de manera
satisfactoria. Hay puntos de soldadura aislados; éstos son los anclajes
de las piezas sujetas con cable unifilar como los portapilas.
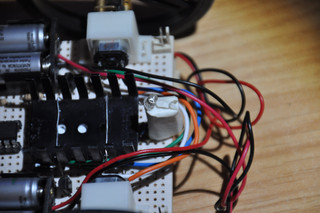
El zócalo para circuitos integrados DIP8 es para el microcontrolador.
Hay que preparar algunos puentes (indicados por trazos negros entre agujeros en el diseño de la placa) para salvar interesecciones de pistas. Los puentes van hechos mediante cable unifilar pelado.
El led blanco que sirve de faro tiene que apuntar hacia adelante, así que hay que soldarlo con suficiente margen en los terminales para poder doblar hacia adelante.
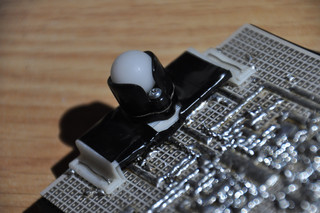
Conviene elevar el fototransistor hasta el límite de sus terminales. Es fácil fijar esta posición con un trocito de papel doblado a la medida adecuada y sujeto mediante cinta de carrocero.
Fototransistor en su soporte de papel.
Los motores van conectados a los terminales 3 y 6 (motor derecho) y 11 y 14 (motor izquierdo) del puente en H L293; estas conexiones van hechas mediante cable lo bastante largo como para pasar tras el fototrasistor pero lo bastante corto para que no sobresalga más allá de un centímetro o dos centímetros. Cada motor tiene una marca con el signo «+» junto a uno de los terminales; consideramos que este terminal es el positivo y el otro el negativo. El sentido de giro del motor depende de la polaridad con la que es alimentado. Para lograr el sentido adecuado sin tener que cambiar el programa de control, hay que conectar el terminal positivo del motor derecho a la patilla 6 del L293, el terminal negativo del motor derecho a la patilla 3 del L293, el terminal positivo del motor izquierdo a la patilla 14 del L293 y el terminal negativo del motor izquierdo a la patilla 11 del L293.
El disipador va montado sobre el puente en H L293. La interfaz entre las dos piezas está impregnada de pasta termoconductora. El anclaje del disipador es mediante cable unifilar pelado soldado a puntos de las pistas de tierra de alrededor del L293.
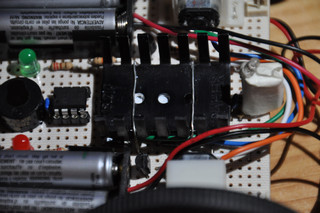
Disipador. Se ven los cables de anclaje y la pasta térmica.
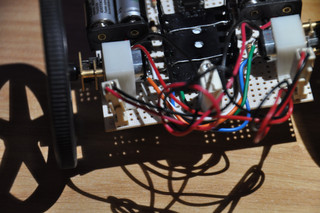
Los portamotores van anclado también con cable unifilar pelado. Tienen agujeros hechos a tal efecto. Hay que soldar deprisa para minimizar la deformación permanente de los portamotores si están hechos de material termoplástico.
Los motores encajan justos en los huecos rectangulares de los portamotores.
Portamotores.
La rueda loca va atornillada a los agujeros centrales de la pieza de suspensión hecha a medida. Como los tornillos y las tuercas son conductores y quedan muy cerca de las pistas, hay que envolverlos con cinta aislante. El anclaje de la pieza de suspensión se hace con la técnica de pasar cable, pero en este caso hay que dar una vuelta (una puntada) por el lado de los componentes porque la pieza a unir va en el lado de la soldadura. Igual que con los portamotores, es conveniente trabajar deprisa pero con precisión para limitar las deformaciones permanentes si la pieza de suspensión está hecha de material termoplástico.
Suspensión de la rueda loca.
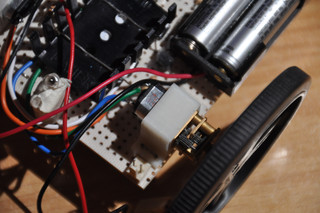
Los portapilas también van anclados con cable. Hay que ponerlos después de la pieza de suspensión de la rueda loca porque cubren el acceso a sus puntos de anclaje.
El terminal positivo del portapilas izquierdo y el terminal negativo del portapilas derecho van al conector derecho (J1 en el diseño de la placa). El terminal positivo del portapilas derecho y el terminal negativo del portapilas izquierdo van al conector izquierdo (B1 en el diseño de la placa). Hay que montar los conectores Molex macho a la placa de modo que la pestaña está en el lado trasero. Hay que montar los conectores Molex hembra de modo que, al enchufar, los terminales positivos queden a la izquierda y los terminales negativos queden a la derecha.
Conectores de potencia del coche.
Montaje del mando a distancia
El mando a distancia es más sencillo que el coche. Para soldar los componentes, basta con seguir el esquema y el diseño de la placa.
La técnica de crear pistas en placas perforadas con estaño también es de aplicación al diseño del mando a distancia.
Igual que sucedía con el faro del coche, hay que apuntar hacia adelante los leds de infrarrojos.
El conector Molex macho va con la pestaña en el lado derecho. El conector Molex hembra va con el cable positivo del portapilas en el terminal trasero al enchufar y el cable negativo del portapilas en el terminal delantero al enchufar.
El reverso de la placa va forrado de papel de cocina u otro material aislante. La sujeción puede hacerse con cinta de carrocero. Esta cinta también es conveniente para sujetar la pila al mando.

Reverso del mando a distancia.
Configuración y puesta en marcha
En primer lugar, hay que compilar el programa de control y escribirlo en la memoria del microcontrolador. Las instrucciones para hacerlo están más arriba.
Después de hacer la programación, hay que enchufar el microcontrolador en su zócalo.
Ahora hay que configurar el mando a distancia. En primer lugar, hay que encender el coche; para ello, hay que enchufar los conectores de potencia B1 y J1. Después, es conveniente montar la placa en algún pedestal aislante (por ejemplo, una caja de cartón) de modo que las ruedas puedan girar libremente. El esquema de control remoto no es muy robusto y para que funcione bien el mando, hay que evitar la incidencia directa de la luz solar, la luz de lámparas incandescentes y la luz de tubos fluorescentes; las lámparas fluorescentes compactas parecen no dar problemas y en general la luz tenue e indirecta es adecuada. Una vez hechos estos preparativos, hay que enchufar el conector de potencia del mando a distancia, apuntar hacia el fototransistor y presionar un botón del mando. Probablemente, la reacción del coche no será la deseada para el botón pulsado, así que habrá que ajustar el potenciómetro correspondiente (el R1 para el botón S1, R2 para S2…) hasta lograr una respuesta satisfactoria. Hay seis funciones:
- marcha adelante (se encienden además la luz verde y la luz roja);
- marcha atrás (no se encienden las luces);
- giro a la izquierda (se enciende además la luz roja);
- giro a la derecha (se enciende además la luz verde);
- activación de la bocina;
- encendido del faro frontal.
Habrá que ajustar los potenciómetros de los seis botones.
A jugar
Tras todo este trabajo, el coche está listo para la acción. Para obtener los mejores resultados, es recomendable disponer de una superficie plana horizontal y una iluminación tenue o indirecta. Hay que apuntar bien el mando a distancia.
El cochecito en acción.
Otros artículos de esta serie
- Presentación y requisitos de diseño.
- Configuración general.
- Concepto electrónico general.
- Suspensión, planta motriz y sistema de actuación y alimentación de dicha planta.
- Señales acústicas y luminosas.
- Sistema de control remoto.
- Diseño del programa de control.
- Lista de componentes.
Categorías: DIY, Electricidad, Informática
Permalink: https://sgcg.es/articulos/2012/06/19/placa-buggy-1-un-cochecito-teledirigido-9/

{kind=link}
{kind=link}
{kind=link}
{kind=link}