Cómo modelar un micromotor de corriente continua (2)
2014-05-10
Muchos pequeños proyectos electromecánicos cuentan con micromotores de corriente continua entre sus componentes. Es conveniente, por lo tanto, disponer de un modelo matemático adecuado que permita realizar un dimensionado rápido y ahorrar tiempo y costes en prototipos fallidos. Seguimos con la serie de artículos que explica cómo modelar estos motores. Hoy vamos a hacer uso de una hoja de datos.
Los datos del motor
Tenemos un motorcillo cuya hoja de datos especifica que la tensión mínima de operación es de 1,5 V, la tensión máxima es de 4,5 V, la corriente en vacío es de unos 150 mA y la corriente en bloqueo a máxima tensión es de 3 A. El régimen libre a 1,5 V es de 4000 revoluciones por minuto o 420 rad s−1. El régimen libre a 4,5 V es de 14000 revoluciones por minuto o 1500 rad s−1. Estos datos son suficientes para el modelo eléctrico del motor en régimen estacionario.
Resistencia interna
La resistencia interna del motor es muy fácil de determinar si disponemos de la corriente en bloqueo a una tensión conocida. Como el motor está detenido, la fuerza contraelectromotriz es nula y toda la tensión Vbloqueo está invertida en mover la corriente Ibloqueo a través de la resistencia interna R. Se deduce que
Vbloqueo = Ibloqueo R.
El ensayo de bloqueo está hecho a máxima tensión: Vbloqueo = 4,5 V. La corriente es Ibloqueo = 3 A. Si introducimos estos datos en la anterior ecuación, sale que la resistencia interna es R = 1,5 Ω.
Coeficiente de la fuerza contraelectromotriz
Con el régimen libre a una única tensión ya sería suficiente para determinar el coeficiente kE que relaciona linealmente el régimen n con la fuerza contraelectromotriz E. Dada la relación
V = E + I R = kE n + I R,
podemos despejar el coeficiente:
kE = (V − I R) ⁄ n.
Tenemos dos puntos de trabajo. En el primero, a tensión V = 1,5 V, el régimen es n = 420 rad s−1 y la corriente es I = 150 mA, con lo que kE = 2,9 mV s rad−1. En el segundo, a tensión V = 4,5 V, el régimen es n = 1500 rad s−1 y la corriente vuelve a ser I = 150 mA, así que se deduce que kE = 3,0 mV s rad−1. La diferencia entre los dos resultados se encuentra dentro de la incertidumbre de los datos de partida; tomamos el promedio kE = 2,9 mV s rad−1.
Curvas características
Como no disponemos de datos sobre el par motor, nos conformamos con una sola familia de curvas: de intensidad frente a régimen de giro.
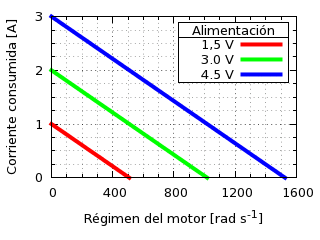
Intensidad frente a régimen de giro para varios valores de la
tensión de alimentación del motor.
Otros artículos de la serie
- Planteamiento del modelo.
- Refinamiento del modelo para tener en cuenta la variación de la fricción interna con el régimen de giro.
Categorías: Electricidad
Permalink: https://sgcg.es/articulos/2014/05/10/como-modelar-un-micromotor-de-corriente-continua-2/
