Cómo modelar un micromotor de corriente continua (3)
2014-06-20
Muchos pequeños proyectos electromecánicos cuentan con micromotores de corriente continua entre sus componentes. Es conveniente, por lo tanto, disponer de un modelo matemático adecuado que permita realizar un dimensionado rápido y ahorrar tiempo y costes en prototipos fallidos. Seguimos con la serie de artículos que explica cómo modelar estos motores. Hoy vamos a ver cómo hacer un pequeño refinamiento para tener en cuenta la dependencia de la corriente en vacío con el régimen de giro.
Si alimentamos con tensión constante un micromotor de corriente continua y permitimos que gire libre, la corriente consumida se iguala a la de vacío, una magnitud que, con muy buena aproximación, podemos suponer que no varía. El par aplicado al eje es proporcional a la corriente que circula por los devanados y hace falta cierta cantidad de corriente, la corriente de vacío, para superar la fricción mecánica interna del motor. Esta fricción mecánica varía más o menos lentamente con el régimen de giro, lo que hace que la corriente en vacío también varíe poco con el régimen al que acaba moviéndose el motor al girar libremente. Las características típicas de los motores conspiran para que podamos suponer que la corriente en vacío es aproximadamente constante, pero podríamos encontrarnos con la necesidad de precisar un poco más. Esto nos obligaría a hacer un ensayo de caracterización de este parámetro.
Si alimentamos el motor con una fuente de corriente y dejamos que gire libre, podemos controlar el régimen de giro con cambios en la corriente aplicada. A menudo, podemos movernos en una zona en la que la relación funcional entre el par de resistencia interna y el régimen de giro queda muy bien aproximada mediante una línea recta; una línea recta entonces aproxima bien la relación entre la corriente en vacío y el régimen de giro. La siguiente figura muestra unas medidas realizadas recientemente:
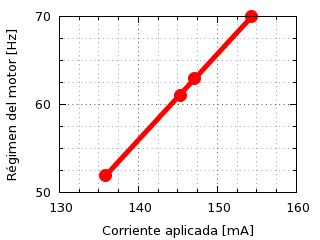
Régimen de giro libre frente a corriente de alimentación. El
motor se detenía por debajo de
los 130 mA; ahí estaba el límite de
validez de la recta de ajuste de la figura, un ajuste que resultó ser
muy bueno para los valores intermedios.
Si podemos hacer este tipo de ajuste, podemos refinar las ecuaciones que sirven para calcular el punto de trabajo del motor. Si usamos un ajuste polinómico de primer grado, por ejemplo, tenemos la siguiente relación entre el par útil T, la corriente I y el régimen de giro n.
T = kT I − kT I0,0 − kT I0,1 n.
Podemos comparar este modelo con el del con primer artículo de la serie, que carecía del término que depende del régimen de giro. En algunas circunstancias, puede ser útil disponer de un modelo un poquito más detallado.
Digamos que buscamos conocer un punto de trabajo; por ejemplo, el de vacío: T = 0. En este caso, la intensidad es
I = I0,0 + I0,1 n.
Introducimos esto en la ecuación que relaciona la tensión de alimentación V con el régimen de giro n y la corriente I:
V = kE n + R I0,0 + R I0,1 n.
Los resultados que ofrece esta ecuación serán a menudo parecidos a los del modelo original, pero con una pequeña corrección.
Otros artículos de la serie
Categorías: Electricidad
Permalink: https://sgcg.es/articulos/2014/06/20/como-modelar-un-micromotor-de-corriente-continua-3/
