Deformaciones mecánicas (6)
2017-09-17
En general, los cuerpos y medios materiales no permanecen perfectamente quietos, sino que se mueven y cambian de forma según transcurre el tiempo como consecuencia de sus interacciones con el entorno y de su propia dinámica interna. Esta serie de artículos trata sobre los cambios de forma o deformaciones.
El tensor de deformación de Green-Lagrange
Describimos, como en los anteriores artículos, un cuerpo material cuyos puntos están identificados por sus posiciones iniciales de radio vector x. El cuerpo experimenta un movimiento general en el que puede desplazarse sin más, pero también cambiar de forma, de manera que sus puntos acaban en posiciones
x'(x) ≡ x + u(x).
El campo u(x) es el campo de desplazamientos en formulación material o lagrangiana, es decir, referido a las posiciones iniciales de los puntos materiales, no a posiciones fijas en el espacio.
Fijémonos en un segmento infinitesimal dx en el instante inicial. Con el movimiento, el segmento se transforma en otro, dx'.
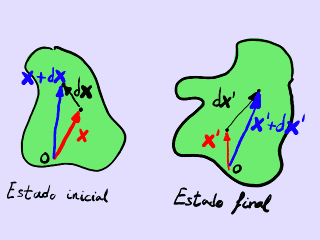
Deformación de un segmento infinitesimal.
Vamos a trabajar con representaciones matriciales en coordenadas cartesianas con cierto abuso de notación. Un vector columna x es una matriz columna cuyas componentes son las del vector homónimo en el sistema de referencia elegido. La traspuesta de esta matriz es un vector fila xT. Por su parte, los tensores de segundo orden tienen representaciones matriciales que son matrices cuadradas cuyas componentes son las de los propios tensores en el sistema de ejes elegido. La traspuesta de la representación matricial A de un tensor homónimo es la matriz AT, cuya componente i,j-ésima es la componente j,i-ésima de la representación matricial sin trasponer.
Seguimos buscando una medida eficaz de lo que se deforma un cuerpo. Ya nos fijamos en que los cambios de longitud son interesantes. Queremos que la deformación sea una medida con un buen comportamiento frente a cambios de sistema de referencia, así que ha de ser una magnitud tensorial. El vector que apunta de un extremo a otro del segmento infinitesimal inicial es una magnitud tensorial (un vector es un tensor de orden 1). El cuadrado de su longitud también es una magnitud tensorial (un escalar es un tensor de orden 0):
(dx)T ⋅ dx.
El cuadrado de la longitud final (tras el movimiento) del segmento infinitesimal es
(dx')T ⋅ dx'.
Sabemos que el segmento infinitesimal tras el movimiento está relacionado con el segmento infinitesimal en el estado inicial mediante una aplicación lineal (el diferencial):
dx' = dx + ∇u ⋅ dx.
De esto se extrae la siguiente expresión:
(dx')T ⋅ dx' = (dx)T ⋅ dx + (dx)T ⋅ [(∇u)T + ∇u +(∇u)T ⋅ ∇u] ⋅ dx.
La diferencia entre el cuadrado de la longitud final y el cuadrado de la longitud inicial queda como una forma cuadrática sobre la longitud inicial:
(dx')T ⋅ dx' − (dx)T ⋅ dx = (dx)T ⋅ [(∇u)T + ∇u +(∇u)T ⋅ ∇u] ⋅ dx ≡ (dx)T ⋅ (2 ε) ⋅ dx.
El símbolo ε de la anterior expresión, una magnitud tensorial de orden 2, es el tensor de deformación de Green-Lagrange, que está definido así:
ε ≡ (1 ⁄ 2) [(∇u)T + ∇u +(∇u)T ⋅ ∇u].
La componente i,j-ésima de este tensor es
εij ≡ (1 ⁄ 2) [(∂uj ⁄ ∂xi) + (∂ui ⁄ ∂xj) + ∑k(∂uk ⁄ ∂xj) (∂uk ⁄ ∂xi)].
Este tensor de deformación es muy conveniente, ya que tiene la interpretación geométrica inmediata que hemos visto y se deriva exclusivamente del tensor gradiente de desplazamiento. Esta conveniencia se ve un poco limitada debido al término cuadrático.
Categorías: Física
Permalink: https://sgcg.es/articulos/2017/09/17/deformaciones-mecanicas-6/
