Placa Buggy 1: un cochecito teledirigido (3)
2012-06-07
Si anteriormente ya vimos los requisitos de diseño y también la configuración general del cochecito teledirigido Placa Buggy 1, hoy vamos a plantear el diseño general de la electrónica.
Diseño general de la electrónica
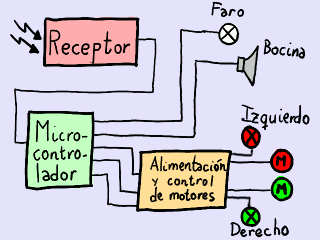
Concepto del diseño electrónico del cochecito.
La lógica de control está llevada por un pequeño microcontrolador con un canal de entrada digital y cinco canales de salida digital. No hace falta un microcontrolador más grande con más entradas y salidas:
- Hace falta una sola línea de entrada para recibir la señal que llega del mando de control remoto.
- Hace falta una sola línea de salida para encender y apagar el faro frontal.
- Hace falta una sola línea de salida para encender y apagar la bocina.
- Con la ayuda de un doble puente en H (que sería necesario
habitualmente ya que los microcontroladores no suelen tener músculo
suficiente para alimentar motores), es posible controlar los cinco
estados de los motores con sólo tres líneas:
- para el reposo, desconectamos la alimentación;
- para la marcha adelante, conectamos la alimentación, configuramos el puente izquierdo hacia adelante y configuramos el puente derecho también hacia adelante;
- para la marcha atrás, conectamos la alimentación, configuramos el puente izquierdo hacia atrás y configuramos el puente derecho también hacia atrás;
- para pivotar hacia la izquierda, conectamos la alimentación, configuramos el puente izquierdo hacia atrás y configuramos el puente derecho hacia adelante;
- para pivotar hacia la derecha, conectamos la alimentación, configuramos el puente izquierdo hacia adelante y configuramos el puente derecho hacia atrás.
- Podemos aprovechar las líneas que controlan el sentido de giro de los motores para accionar las luces indicadoras de dirección, con lo que no hace falta tener líneas adicionales.
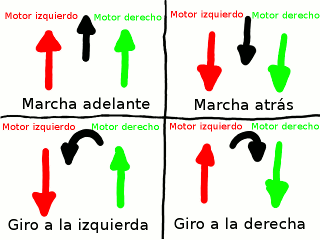
Modos de activación de los motores. Las flechas rojas indican
el sentido de giro del motor izquierdo, las flechas rojas indican
el sentido de giro del motor derecho y las flechas negras indican
el movimiento del coche.
El microcontrolador elegido es un PIC12F629 por encontrarse éste en inventario y ser en todo caso fácil y barato de conseguir en Madrid. El PIC12F629 ofrece una línea digital de sólo entrada y cinco líneas digitales de entrada y salida; cada una de las líneas de salida puede mover 25 mA, lo que es suficiente para alimentar indicadores acústicos y luminosos (aunque no los motores).
Alrededor del microcontrolador van los actuadores e indicadores.
Un pequeño circuito se ocupa de la captación y la adecuación de la señal de control para ser enviada al microcontrolador en forma de niveles lógicos.
En cuanto a la alimentación, ésta es de unos 5 V proporcionados por cuatro pilas recargables NiMH. Esta tensión es adecuada tanto para mover pequeños motores como para alimentar microcontroladores y otros circuitos integrados digitales. También es suficiente para muchos indicadores acústicos y luminosos.
Otros artículos de esta serie
- Presentación y requisitos de diseño.
- Configuración general.
- Suspensión, planta motriz y sistema de actuación y alimentación de dicha planta.
- Señales acústicas y luminosas.
- Sistema de control remoto.
- Diseño del programa de control.
- Lista de componentes.
- Código fuente, planos, instrucciones de montaje e instrucciones de uso.
Categorías: DIY, Electricidad
Permalink: https://sgcg.es/articulos/2012/06/07/placa-buggy-1-un-cochecito-teledirigido-3/
