Últimos artículos
Las polémicas de los videojuegos son una desgracia (2): lo de Yasuke y el Assassin's Creed Shadows
2024-07-25
Los videojuegos son un lujo magnífico, un revolucionario medio de expresión artística para sus creadores y una maravillosa fuente de entretenimiento e inspiración, pero hay una clase de jugadores (Gamers con G mayúscula), gente que vive enfadada con el mundo, que se empeña en afear algo tan bonito y crea malestar donde no ha de haberlo. Esta serie de artículos ilustra algunos ejemplos para que las personas curiosas del futuro puedan sentir vergüenza ajena a gusto. El artículo de hoy trata sobre una polémica relacionada con el videojuego Assassin's Creed Shadows.
De exactitud histórica y a mí me da que racismo
Assassin's Creed es una serie de videojuegos de acción con una ambientación de ficción histórica. En la nueva próxima entrega, Assassin's Creed Shadows, la acción transcurre en el Japón feudal de los últimos años de Oda Nobunaga. Uno de los protagonistas del juego es Yasuke, el «samurái africano». Pues bien, mucha gente está enfadadísima por la posibilidad de jugar como un tipo tan negro como Yasuke. Que si no fue un samurái de verdad (pero, con lo que se sabe hoy, tiene toda la pinta de que sí era un samurái), que si está mal por ser la primera vez que se puede jugar como un personaje histórico (pues vale), que si lo han elegido porque es negro (pues sí, es una apuesta por lo novedoso: Yasuke, que fascinó con su exotismo a Oda Nobunaga, es un protagonista samurái diferente a los montones y montones de protagonistas samuráis con un trasfondo más convencional que no escasean en los videojuegos, y, como destaca mucho por su aspecto, permite plantear un modo de juego que contrasta notablemente con el del otro personaje jugable que tiene este título).
En Assassin's Creed Shadows hay otro personaje jugable además de Yasuke. Es ninja y su origen es japonés, lo que tendría que calmar los ánimos de quienes se quejan de que un juego ambientado en Japón no tenga un protagonista japonés. Si es que hasta viene bien por la variedad: un personaje que destaca mucho y pega fuerte abiertamente, y otro personaje que se esconde y acaba con sus enemigos sigilosamente. Pero, claro, hay un pequeño detalle a tener en cuenta: es una kunoichi, una mujer. ¡Un negro y una female! A más de un Gamer le da algo.
Yasuke el samurái en otros videojuegos
No es la primera vez que Yasuke aparece como samurái en un videojuego. Por ejemplo, salió hace unos años en Nioh como el Samurái de Obsidiana, uno de los jefes a los que había que derrotar. Nioh narraba, con grandes licencias fantásticas, las aventuras de otro samurái extranjero, William Adams Anjin, quien aparecía un tipo tipo rubio, de ojos azules y tez clara. Hubo un poquito de polémica con el tema de William Adams como protagonista por ser blanco, pero no llegó a tanto.
Categorías: Miscelánea
Reparación de la salida de auriculares de un teclado Farfisa TK 85
2024-07-22
Reparé la salida de auriculares averiada de un Farfisa TK 85, un sintetizador PCM de los años ochenta. El ejemplar en cuestión tenía esta salida inutilizada desde hace tres décadas.
El conector de los auriculares tenía los contactos deformados, de manera que era inútil tratar de enchufar los auriculares: la clavija no tocaba los contactos y no salía sonido por los auriculares.

Lado de componentes de la placa de la salida de auriculares antes
de repararala. Se aprecia que los contactos están doblados.
El conector cuenta con un interruptor para detectar la inserción de la clavija de los auriculares, de manera que el teclado activa sus altavoces cuando no hay clavija enchufada y los desactiva cuando la clavija está enchufada. Como los contactos estaban doblados, el interruptor de detección, de tipo normalmente cerrado, estaba permanentemente abierto, pero, a pesar de ello, el sonido seguía saliendo por los altavoces. La respuesta al misterio: le habían hecho el puente.
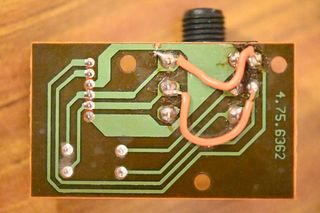
Lado del cobre de la placa de la salida de auriculares antes de
repararala. Aquí se aprecia por qué el sonido seguía saliendo por los
altavoces a pesar de la inutilización del interruptor de detección:
hay unos cables haciéndole el puente al interruptor.
A falta de conseguir una pieza de recambio, la mejor opción para reparar la salida de auriculares era desoldar el conector para poder extraer y enderezar los contactos (además de retirar los cables de puente).

Retirando los contactos del conector. Se mantenían en su sitio a
presión y hubo que sacarlos con ayuda de un botador improvisado y un
martillo pequeño.
Aunque los contactos tenían una mala actitud, fue fácil persuadirlos para comportarse como es debido con percusión y flexión.

Herramientas de herrería miniatura.
Tras volver a introducir los contactos y soldar el conector en la placa, aunque tenía la batería del multímetro en las últimas, pude probar que todo estaba en orden con ayuda de un viejo invento.
Pruebas de continuidad. La clavija de auriculares hace contacto y
además abre el interruptor de detección.
El teclado, tras instalar la placa reparada, tuvo por fin la salida de auriculares de la que careció durante décadas.

Placa reparada.
Categorías: DIY, Electricidad
Con faldas y a lo loco y el dentífrico
2024-07-21
El doblaje español de Some Like It Hot, titulada en España Con faldas y a lo loco, tiene sus momentos perturbadores. Durante una conversación en el tren con Joe o Josephine (Tony Curtis), Sugar (Marilyn Monroe explica que busca una relación amorosa con un millonario con las siguientes propiedades:
un yate, ferrocarril particular y dentífrico particular.
Originalmente:
his own yatch, his own railroad car and his own toothpaste.
¿A qué viene esto del dentífico? Si rebobinamos un poco, encontramos la triste historia de Sugar con los saxofonistas, que explica que siempre acaba igual:
Un buen día, el hombre de tus sueños coge el saxofón, se larga y no deja más que cuentas pendientes que tú tienes que pagar por él; es muy triste.
Aparentemente, esto no tiene nada que ver con lo del dentífrico, pero la cosa cambia cuando nos enteramos de lo que Sugar decía originalmente:
Then, one morning, you wake up, the guy's gone, the saxophone's gone, all that's left behind is an old pair of socks and a tube of toothpaste, all squeezed up.
Esto quedaría así en español:
Entonces, una mañana, te despiertas, el tipo se ha largado, el saxofón ya no está, y todo lo que queda es un viejo par de calcetines y un tubo de pasta de dientes, completamente estrujado.
Esa referencia a la pasta de dientes se perdió en la traducción y lo único que quedó es una lista de requisitos que no tenía ni pies ni cabeza.
Categorías: Cine
Permalink: http://sgcg.es/articulos/2024/07/21/con-faldas-y-a-lo-loco-y-el-dentifrico/
Craig S. Wright, obligado a admitir públicamente que no es Satoshi Nakamoto
2024-07-17
Craig S. Wright, que lleva años insistiendo en que es Satoshi Nakamoto, el pseudónimo del creador de Bitcoin, y metiendo en problemas legales a quien dice que eso es mentira, pero hace unos meses quedó establecido judicialmente que no es Satoshi Nakamoto y que las pruebas que aportó eran falsificaciones. Durante los próximos meses, el señor Wright está obligado a informar públicamente en su página personal sobre estas conclusiones:
- Que no es Satoshi Nakamoto.
- Que fue deshonesto en sus afirmaciones de ser Satoshi Nakamoto.
- Que mintió al juzgado extensivamente y repetidamente.
- Que trató de crear una falsa narrativa falsificando documentos a gran escala y presentando dichos documentos como pruebas.
- Que al tratar de establecer su afirmación falsa de ser Satoshi Nakamoto a través de múltiples acciones legales, cometió un abuso tremendamente serio de los procesos judiciales de Reino Unido, Noruega y Estados Unidos.
- Que no es el autor del Bitcoin White Paper.
- Que no tiene los derechos de autor sobre el Bitcoin White Paper.
- Que no es la persona que adoptó el pseudónimo de Satoshi Nakamoto entre 2008 y 2011.
- Que no creó el sistema de Bitcoin.
- Que no es el autor de las versiones iniciales del software de Bitcoin.
- Que toda la documentación sobre el juicio está disponible a través de este enlace.
- Que tiene prohibido emprender acciones legales basadas en las afirmaciones falsas de que es Satoshi Nakamoto, bien directamente, bien a través de un tercero.
- Que tiene prohibido amenazar con emprender acciones legales basadas en las afirmaciones falsas de que es Satoshi Nakamoto, bien directamente, bien a través de un tercero.
Categorías: Actualidad
Fracaso parcial del vuelo inaugural del Ariane 6
2024-07-15
El vehículo lanzador europeo Ariane 6, cuyo desarrollo comenzó hace alrededor de una década con el objetivo de reemplazar el Ariane 5, despegó el 9 de julio a las 19:00 UTC en su vuelo inaugural VA262. La misión, que consistía en el vuelo con un simulador de masa como carga de pago primaria, varias cargas de pago secundarias para su inyección en órbita y su despliegue en la reentrada fue un éxito solamente parcial, ya que todo fue bien hasta el momento de maniobrar para la reentrada, en cuyo momento una anomalía del sistema propulsivo impidió realizar la maniobra.
Puede decirse que la gran novedad del Ariane 6 es el motor Vinci que propulsa la etapa superior del vehículo. Este motor es reiniciable y se espera que permita inyectar cargas de pago en varias órbitas diferentes en un solo lanzamiento mediante maniobras sucesivas. El Vinci funcionó correctamente durante el vuelo inaugural hasta que llegó el momento de maniobrar para la reentrada. La Unidad Propulsión Auxiliar, un motor Vinci (la gran novedad del Ariane 6) que propulsa la etapa superior no pudo usarse debido a que la Unidad de Propulsión Auxiliar, un motor más pequeño cuya operación era un requisito previo al encendido del Vinci (la aceleración habría servido para asentar el combustible del Vinci), decidió dejar de funcionar repentinamente. Con el combustible flotando en una configuración descontrolada dentro de los tanques, no fue posible maniobrar.
La etapa superior del Ariane 6 del vuelo VA262 permanece en órbita, pasivada para reducir riesgos.
Categorías: Actualidad, Aeroespacio
Permalink: http://sgcg.es/articulos/2024/07/15/fracaso-parcial-del-vuelo-inaugural-del-ariane-6/
Las polémicas de los videojuegos son una desgracia (1): lo de la pausa y el Elden Ring
2024-07-14
Los videojuegos son un lujo magnífico, un revolucionario medio de expresión artística para sus creadores y una maravillosa fuente de entretenimiento e inspiración, pero hay una clase de jugadores (Gamers con G mayúscula), gente que vive enfadada con el mundo, que se empeña en afear algo tan bonito y crea malestar donde no ha de haberlo. Esta serie de artículos ilustra algunos ejemplos para que las personas curiosas del futuro puedan sentir vergüenza ajena a gusto. El artículo de hoy trata sobre una polémica relacionada con el videojuego Elden Ring y el botón de pausa.
De discapacidades
y botones de pausa
Elden Ring es lo que se conoce como un juego tipo Souls y, como buen Souls, es convencionalmente difícil y castiga al jugador por cometer errores. De hecho, como otros Souls, es convencionalmente difícil hasta el punto de que no tiene opción de pausa no solamente en modo multijugador, sino que tampoco la tiene en modo de un solo jugador, con lo que el jugador está permanentemente amenazado, sin descanso, mientras el juego está cargado. Hay alguna forma extraoficial y ligeramente incómoda de pausar el juego que implica navegar por el menú de ayuda, pero no es posible pausar pulsando el botón de pausa como es habitual en otros juegos.
Mucha gente considera que Elden Ring es una obra maestra.
Ahora bien, se trata de un videojuego que, como todavía sucede a
menudo, puede mejorar en el aspecto de la accesibilidad para muchas
personas con diversas
discapacidades, tal
como explicó Alanah Pearce, una conocida escritora de videojuegos.
La polémica explotó tras las palabras de Pearce, que puso como ejemplo
de discapacidad situacional
tener que atender urgentemente a un
niño pequeño y no poder pausar el juego. ¡Vara palabras
desafortunadas cuando hay Gamers al acecho! El enfado que
pillaron fue monumental. Que si ahora tener hijos es lo mismo que
estar manco (no lo es, pero no se trata de eso), que si lo que quiere
es que el juego sea fácil (no, lo que sugiere es que estaría bien que
gente que no puede jugar a ciertos juegos difíciles por cuestiones
ajena a la dificultad pudiera jugar a tales juegos) que si no poder
pausar es sagrado por cuestiones de inmersión
…
Por cierto, Sekiro, de la misma desarrolladora que hizo Elden Ring y considerado por muchos su juego más difícil, sí tiene opción de pausa.
Categorías: Miscelánea
Boeing acuerda declararse culpable de conspiración por el caso del 737 Max
2024-07-11
El gigante de la aviación Boeing, cuyas temerarias prácticas en el desarrollo del 737 Max provocaron la muerte de 346 personas, ha acordado declararse culpable de conspirar para defraudar a la Federal Aviation Authority. Pagará un 2 % de lo reclamado por la familias de las víctimas y se someterá a supervisión durante tres años. Con esto, evita un largo proceso penal y los responsables de las muertes de 346 personas evitan afrontar las consecuencias de sus actos.
Boeing conspiró para ocultar a la Federal Aviation Authority las peculiaridades del diseño del 737 Max que (insisto) provocaron la muerte de 346 personas en dos accidentes ocurridos en 2018 y 2019.
Categorías: Actualidad, Aeroespacio
Situación del vehículo Starliner a finales e junio de 2024 (2)
2024-06-30
Hemos visto que l primer vehículo Starliner en misión tripulada a la Estación Espacial Internacional, que actualmente se encuentra acoplado y en configuración estable, sufre un retraso por tiempo indefinido de su regreso a tierra motivado por unos problemas propulsivos encontrados durante su aproximación a la Estación Espacial Internacional. La vuelta de los dos tripulantes que subieron en el Starliner se retrasa porque el plan era que bajaran en el mismo vehículo en el que subieron. Una situación así, en la que la estancia de unos tripulantes se prolonga debido a circunstancias extraordinarias, no es inaudita, no obstante. Los tripulantes cuyo regreso se posterga no se quedan de brazos cruzados, sino que tienen actividades asignadas para hacer ahí arriba.
Categorías: Actualidad, Aeroespacio
Permalink: http://sgcg.es/articulos/2024/06/30/situacion-del-vehiculo-starliner-a-finales-de-junio-de-2024-2/
Situación del vehículo Starliner a finales e junio de 2024
2024-06-30
El primer vehículo Starliner en misión tripulada a la Estación Espacial Internacional realizó con éxito su acoplamiento el 6 de junio. Aunque tendría que haber regresado hace un par de semanas, el proyecto Starliner es un proyecto maldito, una larga sucesión de problemas, y la combinación de unas fugas de helio y unas disfunciones propulsivas hacen recomendable mantener el vehículo acoplado por el momento. Hay una campaña de ensayos en tierra planeada a partir de la semana que viene para conocer las causas de los problemas propulsivos. El vehículo se encuentra en una configuración estable y es seguro mantenerlo acoplado hasta haber completado los ensayos en tierra.
Categorías: Actualidad, Aeroespacio
Permalink: http://sgcg.es/articulos/2024/06/30/situacion-del-vehiculo-starliner-a-finales-de-junio-de-2024/
No soy homófoba, pero
: versión valenciana que no es lo que parece
2024-06-28
Llega la ya tradicional polémica sobre el no me cuelgue usted esa banera arcoíris de los edificios oficiales en estas fechas tan señaladas. Esta vez viene por la negativa por parte del Ayuntamiento de Valencia. En esta historia hay motivos legítimos no homófobos, declaraciones algo desafortunadas y gente que va a su bola.
La alcaldesa dice esto sobre colgar o no colgar la bandera arcoíris:
Si pongo la bandera del Orgullo, también pongo la del alzhéimer, la del ELA, la del cáncer y también pongo la de todas las banderas y necesidades sociales que tiene esta ciudad.
En septiembre colgaban un cartel sobre el Día Mundial del Alzhéimer. En octubre colgaron un cartel sobre el Día Mundial de la Lucha contra el cáncer de mama. ¿Qué sucede aquí? Resulta que en noviembre tomaron la decisión de dejar de colgar banderas y demás cartelería del Ayuntamiento y poner unos rótulos electrónicos a pie de calle:
Decidimos hace muchos meses transformar esas banderas […] transformando ese tipo de materiales en material electrónico.
Los carteles sobre el alzhéimer y el cáncer de mama son anteriores a esta decisión.
Volvamos a lo de poner la bandera del alzhéimer, la del ELA, la
del cáncer
. ¡Vaya elección desafortunada de causas! Son todas
enfermedades y la oposición encuentra que eso es como comparar la
homosexualidad, la transexualidad y demás cuestiones del Orgullo con
enfermedades.
Habría sido fácil decir sin más que desde noviembre no cuelgan bandera conmemorativas de la fachada del Ayuntamiento, sino que en vez de eso usan unos rótulos electrónicos a pie de calle en los que actualmente se muestra la bandera arcoíris. Y ya está.
Vox no va a participar en esta fiesta globalista LGTBi del Día del Orgullo Gay.
Y también:
Nosotros apoyamos las unidades de convivencia naturales.
Se refiere a un hombre, una mujer y los churumbeles que ambos han tenido. Que vivan las uniones sobrenaturales, supongo.
Categorías: Actualidad, Derechos
Permalink: http://sgcg.es/articulos/2024/06/28/no-soy-homofoba-pero-version-valenciana-que-no-es-lo-que-parece/
